
History of Robotics Laboratory
Robotics Laboratory, founded in 1967 as Biocybernetics (later Biodynamic) Department of the Automation Laboratory, found its research interests in the early days of its work, in the study of kinematics and dynamics of large-scale mechanical systems, mainly of anthropomorphic type. This theoretical work led to important results in the field of spatial active mechanisms, i.e., mechanisms with powered joints. The stability of biped anthropomorphic gait was also studied and led to the introduction of the broadly accepted notion of Zero-Moment Point, the point on the sole of the foot, in which the resultant moment of all forces acting on the biped system, is equal to zero, which formed the theoretical basis for biped gait stability maintenance. This result has been used in practically all realizations of the numerous Japanese locomotion devices, particularly biped robots.
During the 80's, important results were achieved in the various type of research tasks connected for the process of modelling and control of robotic systems. It is: symbolic kinematic and dynamic modeling of robotic systems by computer, generation of dynamic control laws, adaptive control of robots, optimal synthesis of robot trajectories with and without presence of obstacles, control of redundant robots, multi-processor calculation of dynamic robot models, etc.
In the course of the last few years, the associates of the Laboratory have presented and published significant results in the field of neural networks and fuzzy logic in dynamic problems of modeling and control of robotic systems, both for the manipulation and locomotion, notably biped motion ones. One of the most important and latest results of theoretical and applied research is the Unified Approach to the Position/Force Control of Robots interacting with dynamic environment, concerning compliant motion and contact tasks of dynamic systems in general.
Important results were achieved in the field of software development. Several software packages were developed: for CAD of robot mechanical structures (CADMAN), software package for robot control system synthesis (MANSIM), for generating symbolic kinematic and dynamic models of robot mechanical structures (SYM), for simulation of dynamic and control synthesis of flexible production cells (FTS), for dynamics and dynamic control of aircrafts (AER),etc. These and other software packages were usefully applied by robotic departments and several other research institutions in Germany, Russia, China, Canada, Spain and USA.
Scientific and research results are accomplished by the financial support of the Ministry of Science and Technology of Republic of Serbia, but part of these results are realized through several international research and development projects such as: "Study of Restoring Locomotion and Stabilization Functions with One Type of Paralyzed Persons", later "Active Exoskeletons for Paraplegics" in 1970-1972 under a grant by the Social Rehabilitation Service, USA; "Theoretical Study of Legged Locomotion in Animals and Machine", for the National Science Foundation, 1971-1974; "Using Force Feedback for the Improving the Control Systems Consisting of an Electromechanical Manipulator and a Microprocessor-Based Controller", in a joint project with the Lomonosov Moscow State University and the University of Belgrade, 1981-1989; "Dynamics, Control and Evaluation of Robotic Manipulators", a joint project of Mihailo Pupin Institute and Institute of Mechanics and Engineering Design, Faculty of Technical Sciences. Novi Sad, Yugoslavia and University of California, Department of Mechanical Engineering, Berkeley, California, USA, 1989-1993; "Industry Robotics Application", under a grant by UNIDO, 1987-1991; "EU 20 Software System for Planning and Control of Production Systems" and "EU 93+110 Control of Special Kinematic and Mobile Robots", within EUREKA activity.
Industrial Robotics
Together with theoretical research, associates of Laboratory have worked on industrial robotics. In 1978 the first Yugoslav industrial robot UMS-1 was put into service. It was the first design and development of the industrial robot of an anthropomorphic configuration in the world. Its control system was based on processor Intel Z8080. In the years to follow, several successful prototypes of industrial robots (UMS-2, UMS-3, UMS-3B) were developed in cooperation with leading Yugoslav industrial enterprises, and put into service. Important results were obtained with microprocessor-based robot control systems, of which several successful prototypes were developed, tested and applied. Among these, multi-processor universal robotic controller of high performances (based on processor Intel 8086) was developed in 1988 and tested in practice. It was delivered to the Robotics Centre in Moscow, as a part of international cooperation. This model of robotic controller followed the latest trends in the development of electronic software and hardware and enabled the user to profit from the most recently developed highly efficient software robotic languages.
During the late 90's and at the beggining of the 21. century were developed the prototypes of simple, but highly efficient educational robots: ROBED01, ROBED02 and ROBED03, with PC-based control systems. The aim of this robots is to be of universal applicability.
Pioneer Work on Development of Active Exoskeletons – The First Step to the Humanoid Robotics
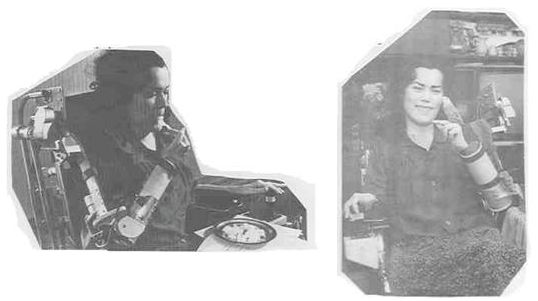
Practical results in this field resulted in the development and construction of the world's first operating active exosceletons (1979-1974), intended for the gait rehabilitation of paraplegic, dystrophic and similar patients. Further research led to the development and successful application of the Active Arm Orthosis, also the first in the world rehabilitation and also the first in the world, Active Legs Orthosis (Active Suit) for medium phases of the same illness. Both devices were bought for evaluation purposes by the Teas Rehabilitation Centre in Houston, USA. Thus, the world community has been informed about our initial results in the domain of so-called active rehabilitation with the aid of robots of exoskeleton type.
World's first walking active exoskeleton, pneumatically powered and partly kinematically programmed, for producing near-anthropomorphic gait. Made in 1969 at the Mihailo Pupin Institute, it was a predecessor of more complex exoskeletal devices for severely handicapped persons. Most successful version of an active exoske leton for rehabilitation of paraplegics and similar disabled persons, pneumatically powered and electronically programmed, realized and tested at Belgrade Orthopedic Clinic in 1972. One specimen was delivered to the Central Institute for Traumatology and Orthopedy, Moscow in the frame of the USSR-Yugoslav inter-state scientific cooperation. From 1991 the exoskeleton belongs to the basic fund of Polytechnic Museum (Moscow) and State Museum Fund of Russian Federation. It is displayed in the frame of the Museum's exposition dedicated to the development of automation and cybernetics.
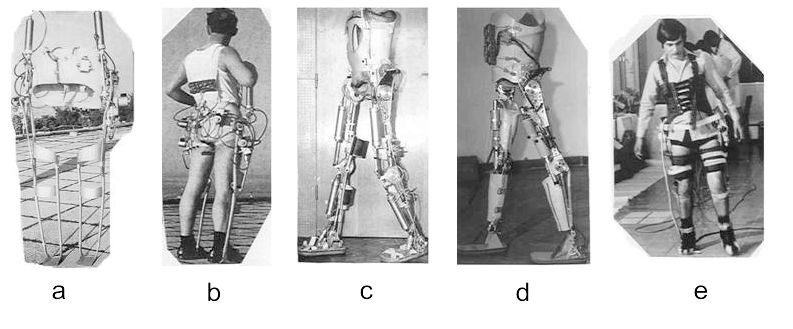
Made in 1978, "Active Suit" - a modular semi-soft active orthotic device for the dystrophic was driven electro-mechanically and microcomputer programmed and controlled. It was successfully used for the purpose of both rehabilitation tests and research purpose. As chance would have it, this was done within the project that was financed by the known US organizations, SRS (Social Rehab. Service) and NSF (National Science Foundation), in the frame of the intensive scientific USA-Yugoslavia cooperation. About this, there are official reports and documents, publications, movie tapes, etc. That was a real sensation and actually the first active exoskeleton in the world. Delivered to the Texas Rehabilitation Center, Houston for evaluation purposes.

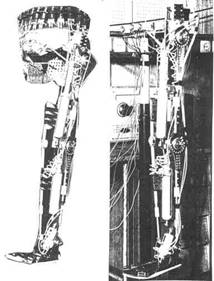
Active exoskeleton with electromechanical drives, electronically programmed, built and tested in 1974. Served mainly to evaluate and develop electro-mechanical drives for active orthotic devices, as the "active suit" or active arm orthosis. This was the first example known in the world of active exoskeleton that used electric motors as actuators. As such, it can be considered as a predecessor of the contemporary humanoid robots driven by electric motors.
During the 90's was developed active above-knee prostehis PROMONA-2, featuring an electromechanical actuator and a microprocessor-based controller.
Direct links for videos: Video 1, Video 2
Beside the robotics research, associates of the Laboratory have been working in the area of aircraft modelling, simulation and control synthesis. As a result of this work, a software package for dynamic simulation and dynamic flight control was developed, while in the collaboration with other Institute laboratories, several aircraft simulators were realized.
Since the beginnings of new millenium, the research topics of Robotics Laboratory is oriented toward service and humanoid robotics through 3 projects supported by Ministry of Science and Tecgnological Development - Republic of Serbia:
- Simulation and Experimental platform for Design and Control of Service Robots - MNTR 00019,
- Dynamics and control of High-Performance Humanoid Robots: Theory and Application - MNTR 006315,
- Humanoid Robotics – Theory and Applications - MNTR 14001.
Some of prominent scientific results have been presented in more than 300, published in leading scientific journals in USA, Europe and Russia and more than 500 papers in proceedings of international conferences. These results also enabled publication of the 7 volumes in the series: Scientific Fundamentals of Robotics by Spinger-Verlag and 2 book at Kluwer Academic Publishers. These books were favourably reviewed by numerous readers and users at faculties and research centers around the world. Three of these books were published in Russia, two in Japan and six in China.
Robotics Laboratory continues with intensive research and development. It is contributing to the knowledge in the field of robotics in the country and abroad. The associates of Robotics Laboratory based on research results from the robotics area have been received M.Sc. and Ph.D. degrees in the mechanical and electrical engineering.