
Research Topic: Anthropometry - Identification of Body Measures (Human Body Kinematic & Dynamic Parameters)
Quantitative biomechanical analysis of human body locomotion/movements typically requires estimation of body limbs/segments parameters (mass, position of the center of mass, principal radii of gyration, moments of inertia, center of joints, etc.).
Specifying details of human biometry measurements as well as applying methodology of Zatsiorsky-Seluyanov (based on statistics obtained measuring cadavers) as well as improved tabular approach of parameter identification proposed by Paolo De Leva, a specialized software for identification of anthropomorphic parameters has been developed. For the known mass and stature (height) of the body and with certain photometry measurements the anthropomorphic parameters, with satisfactory accuracy, can be obtained. These parameters can be used for simulation purposes in human bio-mechanics as well humanoid robotics. The researches have been performed in cooperation with colleagues of University of Reunion, Faculty for Sport and Physical Activities, Le Tampon, France.
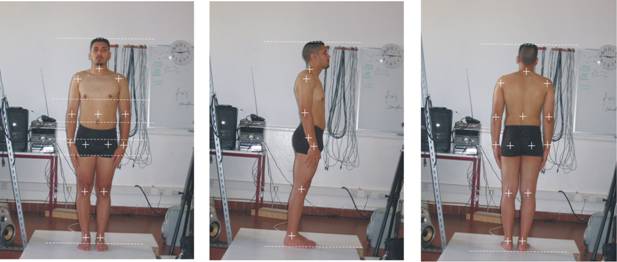
Fig. 1. Anthropometry – measuring of body parameters for the purpose of
researches in human bio-mechanics (University of Reunion, France).
![Identified human body parameters of a patient
43 years old, lump mass 84.07 [kg] and height 1.90 [m]](./images/research-topic12-02.jpg)
Table 1. Identified human body parameters of a patient
43 years old, lump mass 84.07 [kg] and height 1.90 [m].
![Dynamic body parameters – inertia tensor and radii of gyration of
a human body of m=84.07 [kg] and H=1.90 [m]](./images/research-topic12-03.jpg)
Table 2. Dynamic body parameters – inertia tensor and radii of gyration of
a human body of m=84.07 [kg] and H=1.90 [m].
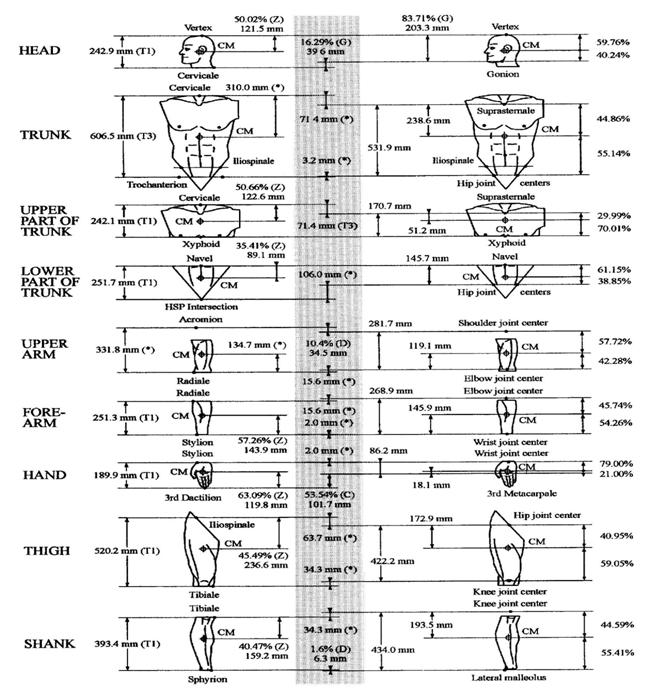
Fig. 2. A graphic description of the main adjustments to the relative CM positions,
according to Paolo De Leva, used in the parameter identification.