
Research Topic: SMART HANDS – Building of Intelligent Dexterous Dual-arm Manipulation of Advanced Service Robots
The reserch objectives concern with building of the algorithms for advanced anthropomorphic, dual-arm robotic manipulation through bio-inspired mapping of handling skill, imitation, perceptive learning, case-based reasoning and scenario-driven, bio-inspired behaviour.
Building of dexterous manipulation of dual-arm robotic systems is based on: (i) learning of anthropomorphic manipulative gestures (objects handling), (ii) usage of visual feedback, and (iii) identification of functional correlation between object features, type of task and corresponding kinematical/dynamic performances of robotic system (Fig. 1). Robotic system, assumed for the research purposes in this project, is trained to be capable to provide different realistic, bio-inspired, anthropomorphic manipulative gestures operating with real objects of different shape (geometry). For that purpose, extensive capture motion experiments with biological dual-arm system (Fig. 2) have been performed. Contact dynamics during objects handling is captured, too. Contact dynamics assumes measurement of the corresponding contact forces and moments necessary for task performing (pick and place, grasping, insertion, screwing, etc.). Some of the characteristic complex manipulative tasks are presented in Figs. 3.
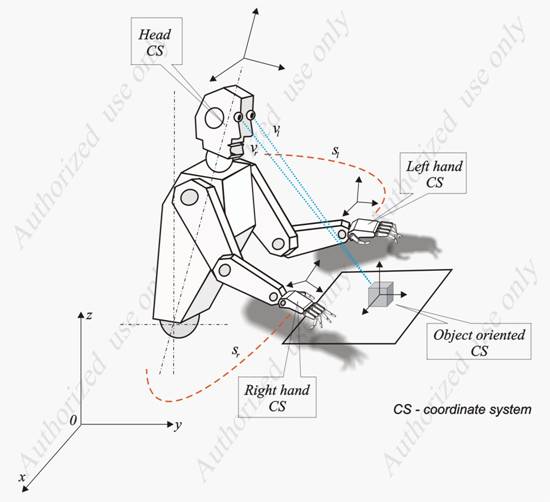
Fig. 1. Dual-arm robotic manipulative task in the operational task space.

Fig. 2. Experimental measurements of anthropomorphic manipulative tasks with capture motion system VICON-460 (in cooperation with University of Reunion, Faculty of Sport and Physical Activities, CURAPS, France).
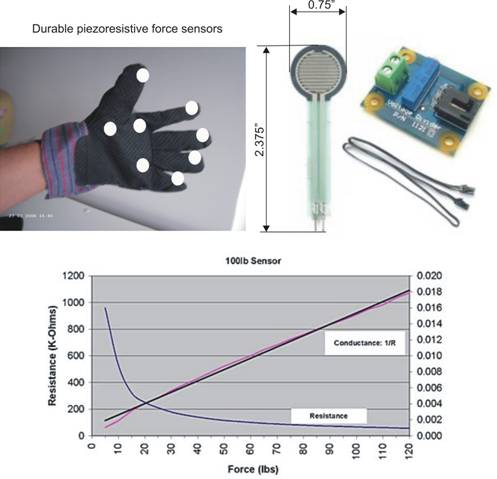
Fig. 3. Mesurements of contact forces required for task performance by use of the accurate piezoresistive froce sensors.
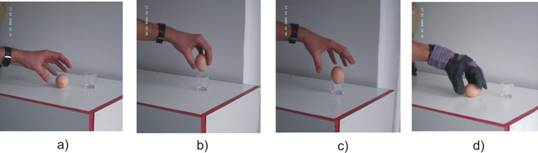
Fig. 4. Egg pick-and-place manipulative task requiring accurate object positioning with required contact force grasping.
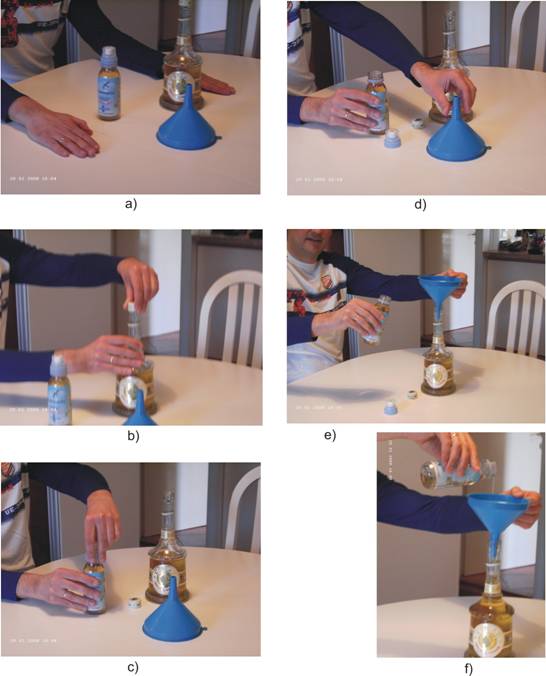
Fig. 5. Multi-phases dual-arm manipulative task of bottle decanting requiring very precise positioning.
Principle scheme of learning the dual-arm manipulation skill based on captured information about arms/hands kinematics and dynamics is shown in Fig. 6.
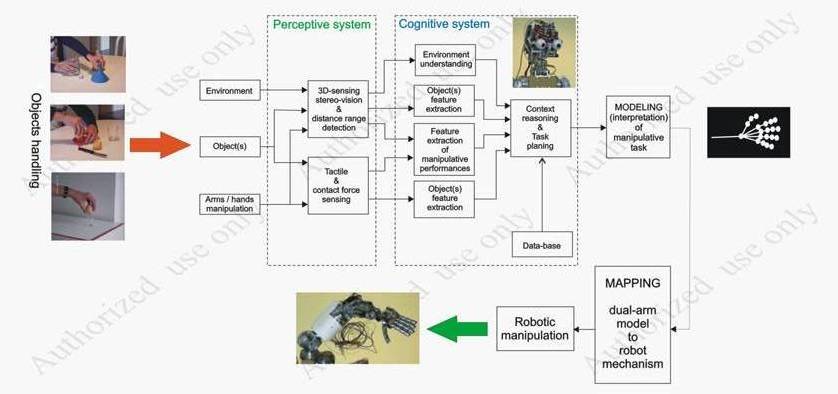
Fig. 6. Layout of the principle block-scheme of learning manipulative skill through different real tasks.
For the purpose of reserches a complex anthropomorphic model of dual-arm system is deveoped in virtual reality. A human skeleton, as a biological model of the system, is used as model reference (Fig. 7).
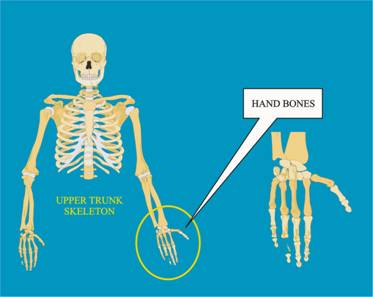
Fig. 7. Human skeleton of the upper trunk with two arms and hands used as a referent model for building of the model of dual-arm robotic system model.
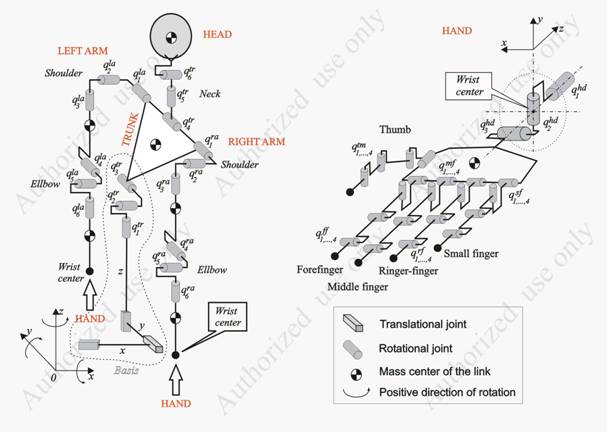
Fig. 8. 67 d.o.f. kinematical model of dual-arm, bio-inspired robot mechanism (9 d.o.f. trunk, 2 x 6 d.o.f. arm, 2 x 23 d.o.f. hand) used for control synthesis and evaluation of the results in virtual reality.