
Research Topic: Mathematical Modeling of Non-Smooth Impact Dynamics of Human Gait – Theory & Experiments
The research concerns with modeling of non-smooth frictional biped contact/impact dynamics including friction phenomena during regular human/humanoid walk.
The impact phase starts when the biped link reaches the surrounding object(s). Strictly speaking, the restricted coordinates at the robot foot reach zero one by one. So a complex contact is established as a series of simpler contact effects. The impact begins when the biped foot reaches the constraint surface. Constraint in a general case can be an ordinary curve, prismatic or flat surface (Fig. 1). Accurate modeling of non-smooth, frictional impact dynamics was subject of the comprehensive researches conducted in this project.
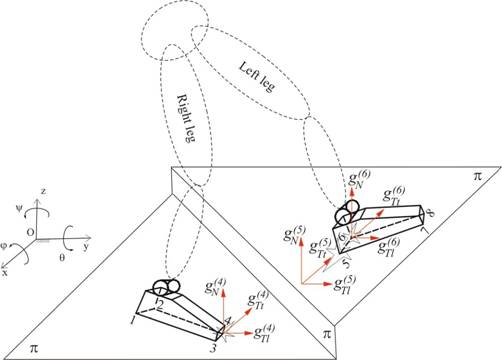
Fig. 1. Modeling of feet impact dynamics – mechanical set of the problem.
Frictional model of impact dynamics was considered as a Linear Complementarity Problem (LCP) formulation. Stiction as well as friction phenomena were included into the model, too. In Figs. 2 and 3 some simulation results, obtained by implementation of the LCP approach of modeling impact phenomena, are presented.
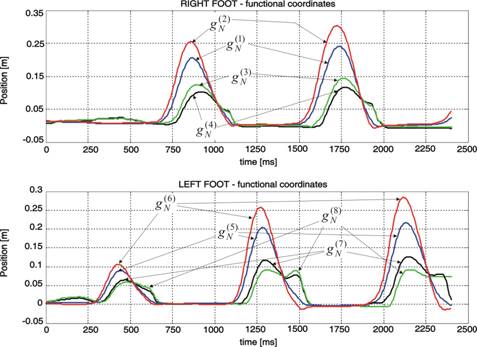
Fig. 2. Functional coordinates of the left and right foot determining the relative positions of the feet contour points (cycloids) with respect to the support in the direction perpendicular to the supporting surface.
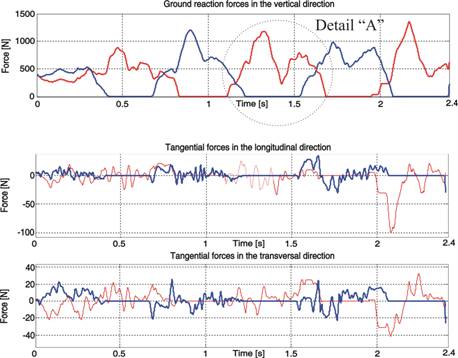
Fig. 3. Model-based ground reaction forces determined at the right and left foot during gait phases.