
Human machine interface for medical application
Coupling of modern technologies: robotics, image processing, digital radiology and sensors, two systems will be designed: for support vertebroplastics (RPVP) in interventional radiology and colonoscopy simulator. The central place belongs to intelligent mechanical interface which in case of vertebroplastics provide reliable and safe workplace for operater without radiation, but in case of colonoscopy , realistic simulation of interaction between colonoscope and bowels for better operator’s training. In both cases the function of interface will be supported with external diagnostic and measurement systems. The main function of interface is to transfer force interaction information from robot with tissue to master robot on the operators side and to restrict operator of using model with inadequate commands in preoperational defined safe zone. In RVPM, external diagnostical sistem will consist of patient-table, system for source positioning, digital reciever X-ray and following software for registrating 2D picture into 3D model obtained by CT or MRI. Colonoscope simulator use external sensor for positioning and orientation of magnet used to record manipulation, deflection and propagation of colonoscope during the examination. There will be implemented a system for measirng of the interaction force between operator’s hand, colonoscope and tissue for purpose of making comperhensive model. Subsystem will be designed in accordance with medical safety standards and EMC with provided equipment.
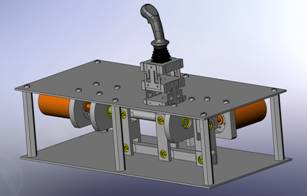
CAD model of the simulator prothotype