General Description
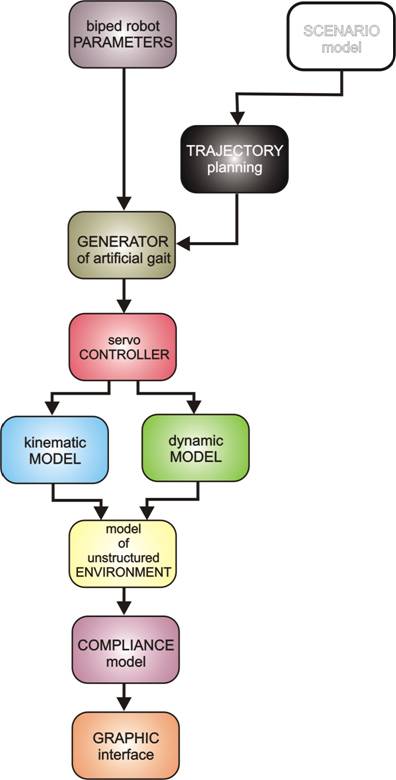
HRSP (Humanoid Robots Simulation Platform) is a research software platform for the customized modeling and simulation of biped robot mechanisms (humanoid robots). It represents a MATLAB/SIMULINK engineering toolbox designed for simulation of biped robot and human kinematics and dynamics for arbitrary chosen (imposed) set of mechanism/body parameters. HRSP provides a possibility to simulate a biped system behavior for various control laws (at the servo level as well as cognitive high-level) including different feedback loops (position, speed, dynamic reactions, joint payloads, Zero Moment Point relative position, etc.). HRSP runs at a PC computer under Windows XP operating system. Structure of the HRSP program-suit with the particular software modules available is shown in the picture on the right (click on the picture to see the larger one).
Biped robot parameters
A scalable procedure of identification of human-body parameters was designed based on experimental background in capture motion studio. Customer are free to define their own robot parameters by a simple editing a data-file.
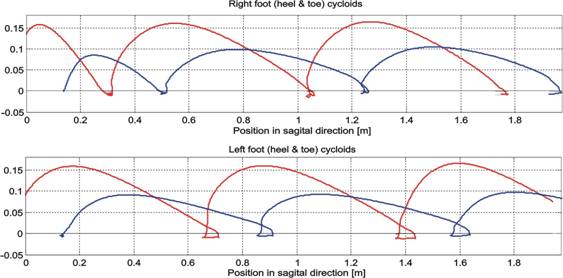
Trajectory generation – artificial gait generator
HRSP – Trajectory generation module calculates reference (nominal) biped motion depending on the imposed task and basic gait parameters:
- forward speed,
- type of the path (linear, non-linear),
- step length,
- step height, as well as a profile of the supporting surface (flat, inclined, incremental - stairs like, etc).
Scenario model & Trajectory planning
The module enables modeling of different real scenarios including obstacle avoidance and collision avoidance as presented in the figure bellow.
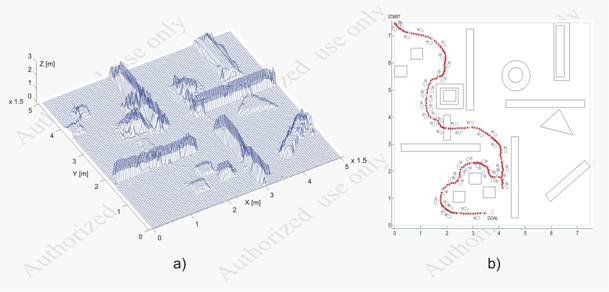
3D model of one characteristic scenario model with different geometry obstacles and AI algorithms enable
trajectory prediction in the presence of mobile and immobile obstacles.
Kinematic model
HRSP-Robot kinematics module computes the homogeneous transformation matrices between the end-links (biped feet, hands, head) coordinate frames and the base reference frame attached to the mass center of the pelvis link as a basis. HRSP also determines the Jacobian matrices that correspond to the biped tip points positions (end-points of the feet links, hands, and head link) and corresponding angular velocities. Two types of Jacobian matrices are available:
- the coupled Jacobian matrix with respect to the basis frame, and
- the Jacobian matrices for the particular side-branch chains of biped mechanism.
HRSP takes into account the specific structure of each biped mechanism. Kinematic characteristics are defined by Denavit-Hartenberg notation. As an example available within HRSP, a spatial non-linear 38 degrees of freedom biped model was designed and simulated. Validity of the model was checked by comparison of the simulation results and corresponding experimental measurements obtained using biological system (human body) in different gait phases.
Dynamic model
HRSP-Robot dynamics module is able to calculate:
- driving torques in the biped system (robot) joints,
- the coupled inertial matrix,
- the coupled vector of gravitational forces,
- the coupled vector of Coriolis and centrifugal terms,
- the vector of gravitational, Coriolis and centrifugal terms,
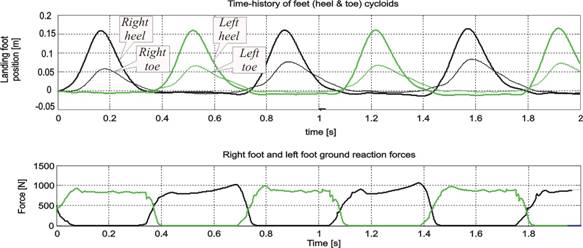
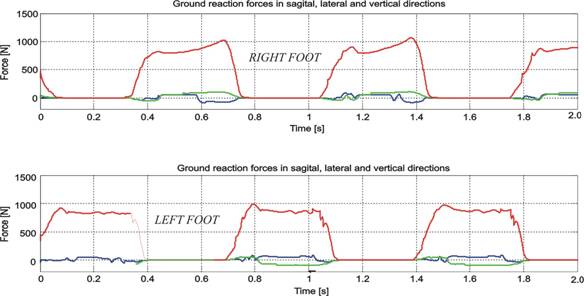
- ground reaction forces acting upon the robot feet, and
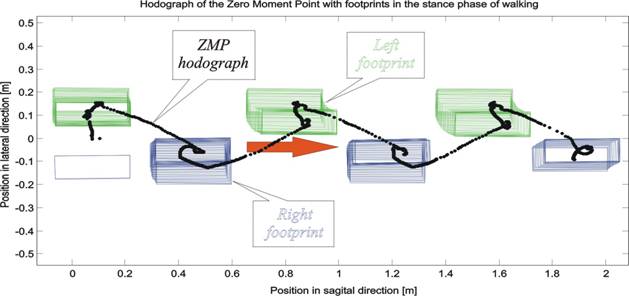
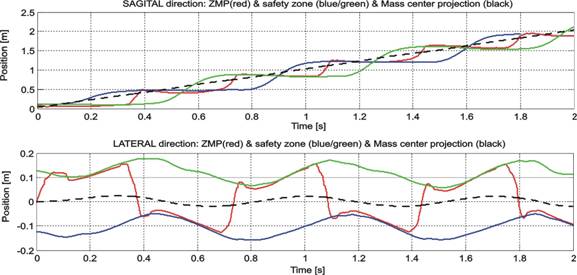
- relative position of the Zero Moment Point (ZMP) with respect to the center of the supporting polygon.
Control Laws
There is a variety of available control law algorithms that HRSP can support starting from the simplest PID regulators to the more complex dynamic control laws such as: computed torque method, hybrid position-force control, impedance control, intelligent knowledge-based control, etc. Customers are enabled to define their own control algorithms for the same set of robot/body parameters. HRSP enables closed-loop simulation of different control schemes including the most popular impedance and computing torque methods.
System Simulation
HRSP enables simulation of the entire dynamics of the mechanical part of the system as well as actuators (DC motors). The user should specify the parameters that are needed during the simulation: altered dynamic parameters of the system, white noise variance for the measured signals, different sampling periods, initial position, velocity and currents, data acquisition during the simulation, etc. User-friendly graphical presentation of the simulation results is available, too.
Videos - Simulation Results
Direct links for videos:
Video 1 - Biped walking in sagital plane
Video 2 - Biped walking in frontal plane
Picture Gallery