
General description
This program system is generated in MATLAB. Program system FLEXI developed on this level can be used for synthesis and analysis of the complex elastic robotic system of biped-platform type and it can be expanded from different aspects, according to the users’ needs. Algorithm generates a mathematical model of complex humanoid robotic system that walks on immobile/mobile platform. The modeling task is solved as software so that a user should only choose the joint types and of course all system parameters and program system FLEXI will generate the model of configuration defense that provides the possibility of the analysis of its dynamic behavior. Characteristics of configuration complexity of robot system and choice of elasticity characteristics in the system are no longer restrictive factors in synthesis and analysis of kinematics and dynamics of biped-platforms systems. The software package includes possibility of simulation of an example with elastic joints in the foot sole or platform. It shows the existence of dynamic coupling between the biped and platform during the realization of a robotic task. Using program system FLEXI, a user can choose a system configuration that would be analyzed as well as types of certain freedom degrees. There is a possibility of extension of program system FLEXI from different aspects according to the users’ needs.
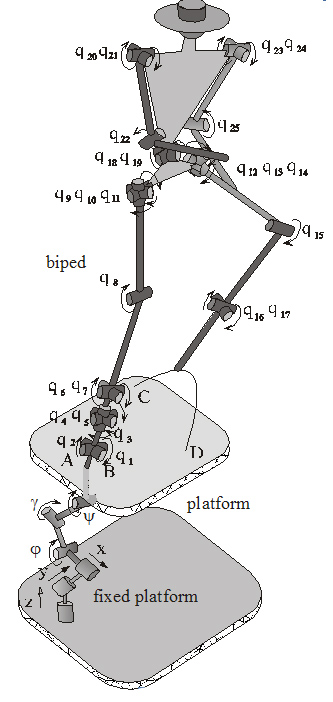
Fig. 1. Humanoid robotic system that walks on immobile/mobile platform.
The area to which the technical solution refers
Synthesis and analysis of humanoid robotic systems in contact with immobile or mobile platform, Theory of elasticity and Theory of oscillations
Problem solved by technical solution
This technical solution solves the problem of efficient synthesis and analysis of robot model with rigid and elastic elements in its construction, as well as testing its behavior under simulated real conditions of robot task realization.
State of the problem solution in the world
Modeling simulations of locomotive mechanisms of rigid anthropomorphic structure is certainly very complex problem. One strong class of mechanisms used for different artificial motions of locomotive-manipulative type has been developed strongly in last four decades. Regarding the structure complexity and number of possible freedom degrees of motion (powered or unpowered) the modeling of these systems presents a complex task which success influences the realization of most today known control algorithms as well as synthesis of nominal walk. The system structure is defined with a set of Denavit-Hartenberg’s parameters and it consists of many open kinematic chains and some of them become closed in the phases of task realization (biped phase). Until now different types of humanoid robots which can walk on the flat surface (immobile or mobile), on stairs and differently configured field have been widely analyzed from different aspects and constructed. The biped mechanism is very complex mechanical system with coupling between some freedom degrees.
In published literature and some implementations, authors mostly dealt with the construction of different platform types, such as e.g. Stewart platform. A platform is not a “black box” which content we are not interested in and which realizes some motions of its upper surface. These motions of platform surface are the result of the selected platform configuration motion, its geometry, present masses and some other values. A platform is a mechanism which has its construction and geometry and just because of its physical construction there are couplings of its freedom degrees.
The analysis of the humanoid robot motions that moves over the mobile surface is wide and unexplored area to which authors have not devoted much attention. A small number of papers deal with a subject that analyzes the mutual connection between platform and biped. This subject is analyzed in order to describe the influence of biped motion dynamics on platform motion dynamics and vice versa as realistic as possible.
In this research phase the biped motion is programmed on both immobile and mobile platform. In order to define all mathematical models of the observed locomotive mechanism of biped and platform anthropomorphic structure with e.g. “31 active freedom degrees” (25 in biped and 6 in platform) with choice of any possible joint type combination, the total number of mathematical models should be defined. Therefore, the modeling task has been solved as a program, so that a user should only choose the type of every joint and of course other system parameters (program package generates model) and it enables the analysis of its dynamic behavior.
The essence of the technical solution
In this paper the program package that can be used for synthesis and analysis of elastic robotic systems of anthropomorphic structures (biped platform) is synthetized and it can also be upgraded and expanded from different aspects according to the user's needs.
This software package serves for the analysis of a complex humanoid robotic system that walks on immobile or mobile surface. It enables the choice of robot configuration as well as platform configuration. Each platform or biped joint can be chosen as an active or inactive one. A user can define each biped or platform joint as a rigid or elastic one. Some elastic joints can be defined as elastic powered ones (meaning that a joint has a motor in front of the elastic element) and others can be defined as elastic unpowered ones (a joint without motor in front of elastic element). Different biped and different platform configurations can be formed depending on the user’s desires. Program package forms a mathematical model of the complete system. With the choice of system parameters after the simulation it is possible to analyze biped dynamic behavior of the chosen configuration that walks on immobile surface or on mobile surface of the chosen configuration.
At the moment when the biped approached the platform, it affects the biped motion dynamics with its characteristics, and also the biped affects the platform motion dynamics with its characteristics. In contact these two complex systems become one more complex system which mathematical model includes completely all coupling elements between platform freedom degrees and biped freedom degrees. The analysis of coupling features between biped and platform is firstly done in a variant that a humanoid robotic system with all rigid elements is in a contact with a platform mechanism which elements are also rigid. The coupling phenomenon is even more expressed when elastic elements are included in both humanoid and platform configuration. Not knowing the coupling features can cause a significant disorder in a system during robot task realization.
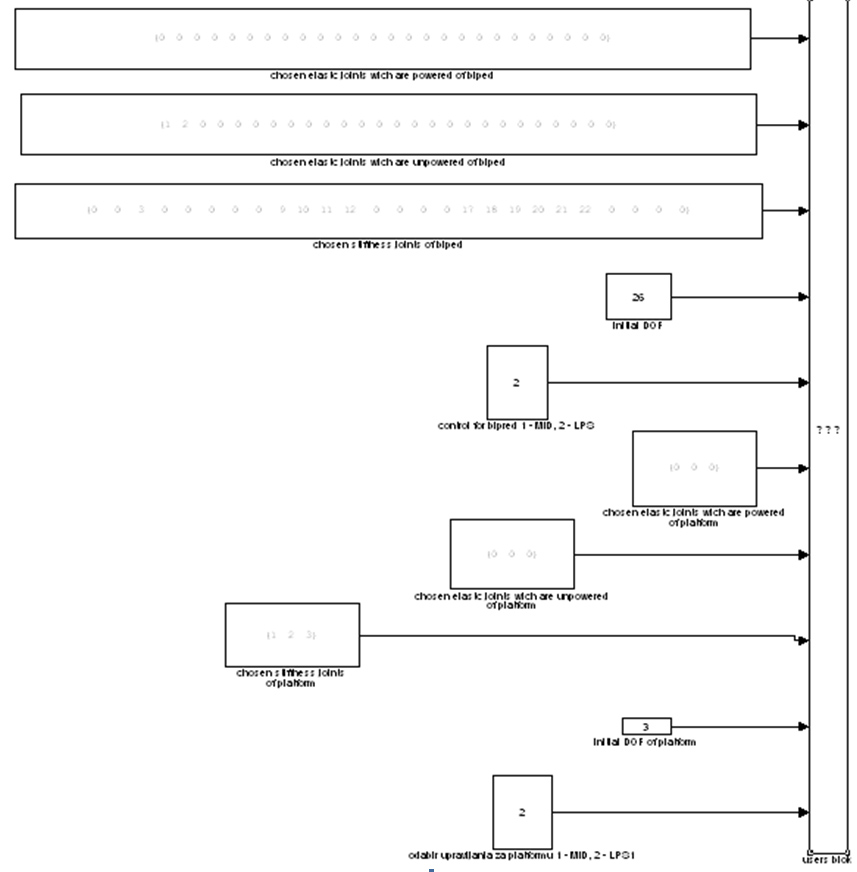
Fig. 2. The first level of Program system FLEXI.
Motion instability that is present during the realization of some robotic tasks indicates the need for synthesizing new control structures for stabilizing biped motion on a mobile platform. Defining the nominal trajectory can be approached very differently and from a few aspects. Nominal trajectory of every joint can be defined in order to include elastic deformation or not (elasticity is unknown on the nominal level). The control structure of a biped that moves on the ground should be defined so that the requirement that biped motion stability should be guaranteed in the observed regime in any selection moment is satisfied. In fact, defining a nominal can be a very demanding problem depending on what we want to analyze. The key solution is to find connection between the requirement to define all conditions of biped stable movement and nominal trajectory movement of each joint of both biped and platform.
This dictates both strategy and type of control in order to satisfy the set requirements. The control is defined as the collective control of CNU (centralized nominal control), plus LO (Local feedbacks of motor motion by position and speed).
In case of biped motion on a mobile platform, CNU is defined in the special real conditions not knowing the coupling features between these complex systems. Analysis of the simulation results of the humanoid robot motion on the mobile platform indicates the complexity of the system and shows how the system parameters (choice of trajectory, configuration, geometry, elasticity characteristics, motor ...) influence stabilization of its humanoid motion.
Detailed features description
Program package that can be used for synthesis and analysis of elastic robotic system of anthropomorphic structure (biped-platform) is synthesized in this paper and it can also be upgraded and expanded from different aspects according to the user’s needs.
Algorithm for generation of mathematical model of complex humanoid robotic system that walks on immobile or mobile platform is defined. Defined algorithm is valid for any number of freedom degrees of chosen biped and any number of platform freedom degrees. We have applied it on a sample of a robot with 25 freedom degrees that walks on platform with 6 freedom degrees. Model equations change structure depending on the definition of certain joints. Modeling task is a programming one so that a user should only choose a type of each joint and of course other system parameters (program package generates model) and it enables analysis of its dynamic behavior.
Equations of total humanoid model from Figure 1 change structure due to the definition of a certain joint.
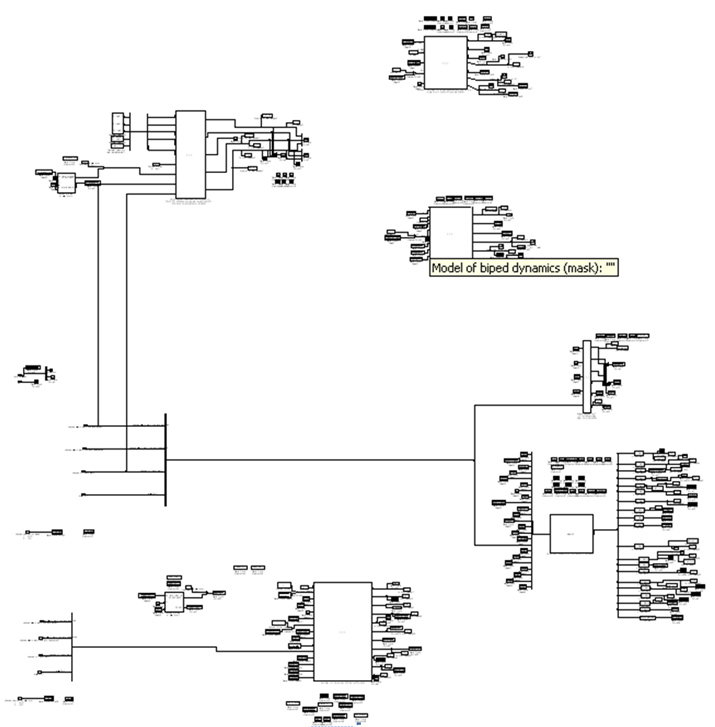
Fig. 3. Global organizational structure of the Program system FLEXI.
In order to define every mathematical model of observed locomotive mechanism of anthropomorphic structure with 31 freedom degrees with the choice of any possible combination of joint type, it is necessary to define total 331 mathematical models. This would certainly be a great work. Therefore the modeling task is solved as a programming one, so that a user should only choose each joint type and of course other system parameters (program package generates model) and it enables analysis of its dynamic behavior. Chosen configuration from Figure 1 has one more specificity and that is an elastic foot sole. In general case there can be 6 deformations, three rotations around local coordinate system and three translations. Since translational freedom degrees in foot sole less influence the stability of biped motion, they are completely excluded from the analysis. Also the motion in sole joint is excluded from the analysis which is realized around vertical axis of the local coordinate system because it is not interesting in this example. Only two joints, two rotations are active in foot sole. Only these two rotations (deformations) are analyzed because they can significantly influence the stability of biped at its motion.
Program system FLEXI defines a dynamic model of humanoid robotic system which also includes elasticity elements on the basis of dynamics classical principles, but joining the realization of these principles, starting from the fact that the elastic deformations are the real present effects that directly depend on the current dynamic loading mechanism.
Dynamic model of final equations of system motion is obtained by applying Lagrange’s equations.
It is presented that the coupling feature in the biped-platform
construction is a basic feature which must not be neglected anymore in
further analysis of the biped motion on the platform.
An essentially new approach to the consideration of elastic robotic systems that opens new possibilities in analyzing and modeling of these systems as well as in implementation of new control laws is obtained.
The simulations analyzed the dynamics of biped motion on a mobile platform comprising a rotational degree of freedom. Coupling feature between biped and platform indicates the necessity of formulating new control laws for the stability control. In case of inclusion of elastic properties, coupling property increases and it increases motion instability. It turned out that the selection of parameters (motors, configuration, geometry, elasticity characteristics, and choice of trajectories ...) of such a complex system of biped-platform can play a significant role in the system stabilization. This is only one aspect of the analysis of robotic system dynamic behavior which widely opens door to other research aspects. Our ultimate goal is to achieve a biped humanoid motion on the platform, and this is possible only if as much truth as possible about this system is revealed.
Program package FLEXI that is synthesized specially for the purpose of comfort analysis of such complex system served for obtaining simulation results. System configuration that should be analyzed as well as types of certain freedom degrees can be chosen using this program package. There is a possibility of expansion of the program package from different aspects according to the user’s needs.
References
[1] Mirjana Filipović, Veljko Potkonjak and Miomir Vukobratović: "Humanoid robotic system with and without elasticity elements walking on an immobile/mobile platform”, Journal of Intelligent & Robotic Systems, International Journal, Volume 48 (2007) pp. 157 - 186.