
Research Topic: WRSN – Wireless Robot-Sensor Network systems
Wireless Robot-Sensor Networked (WRSN) systems refer to multiple robots operating together in coordination or cooperatively with sensors, embedded computers, and human users. Cooperation entails more than one entity working toward a common goal while coordination implies a relationship between entities that ensures efficiency or harmony. Communication between entities is fundamental to both cooperation and coordination of the networked systems. Embedded computers and sensors are now ubiquitous in homes and factories, and increasingly wireless ad-hoc networks or plug-and-play wired networks are becoming commonplace. Robots are functioning in environments while performing tasks that require them to coordinate with other robots, cooperate with humans, and act on information derived from multiple sensors. In many cases, these human users, robots and sensors are not collocated, and the coordination and communication happens through a network.
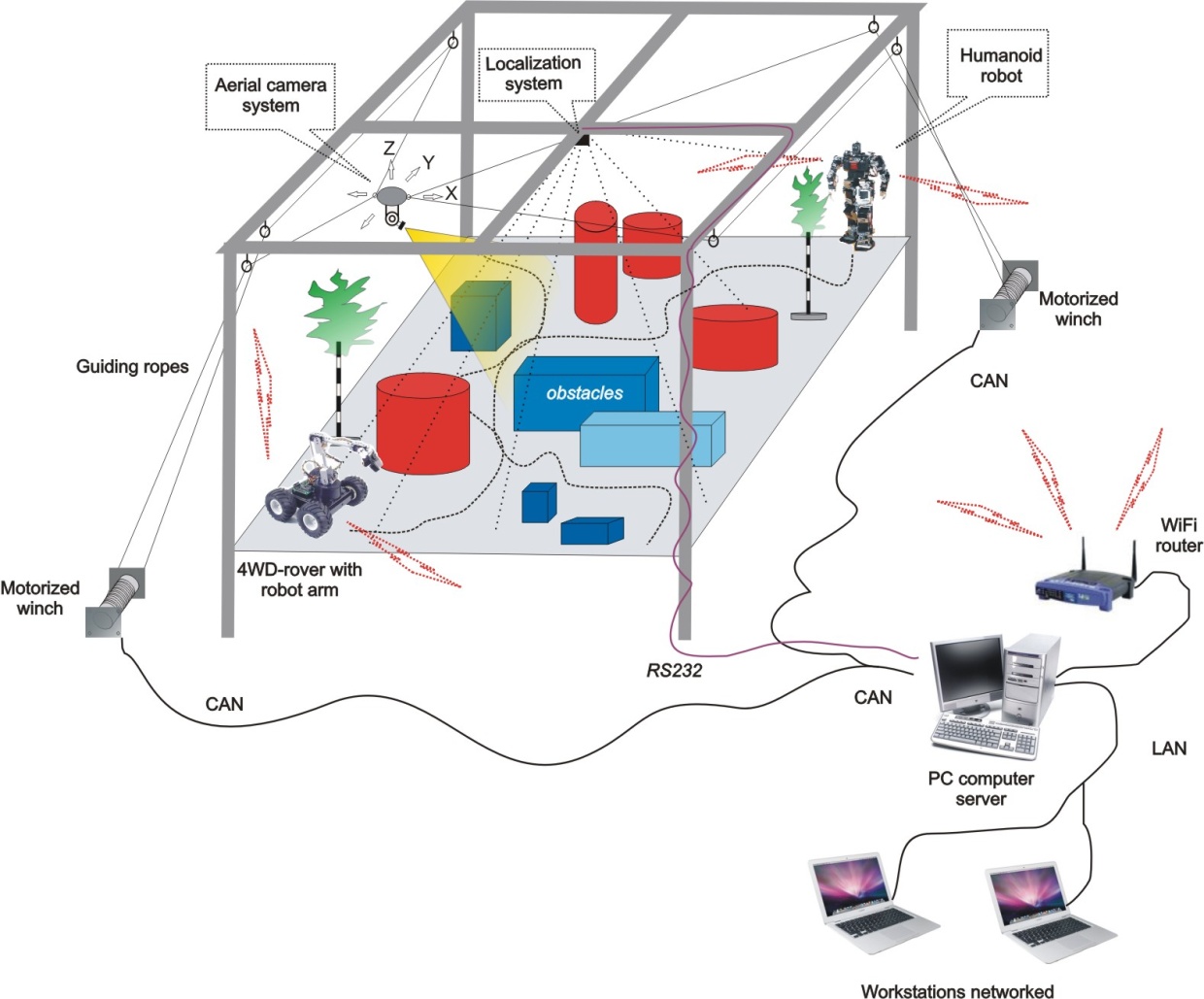
Fig. 1. Concept of the considered WRSN system with 19 d.o.f. humanoid robot, 4WD robotized vehicle with 5 d.o.f. robotic arm, aerial camera system for monitoring workspace, system for localization, control and communication devices and immobile obstacles.
Networked robots allow multiple robots and auxiliary entities to perform tasks that are well beyond the abilities of a single robot. Robots can automatically couple to perform locomotion tasks and manipulation tasks that either a single robot cannot perform, or would require a special-purpose larger robot to perform. They can also coordinate to perform search and reconnaissance tasks exploiting the efficiency that is inherent in parallelism. They can also perform independent tasks that need to be coordinated. Networked robots also result in improved efficiency. Tasks like searching or mapping, in principle, are performed faster with an increase in the number of robots. A speed-up in manufacturing operations can be achieved by deploying multiple robots performing operations in parallel, but in a coordinated fashion. Perhaps the biggest advantage to using the network to connect robots is the ability to connect and harness physically-removed assets. Mobile robots can react to information sensed by other mobile robots in the next room. Human users can use machines that are remotely located via the network. The ability to network robots also enables fault-tolerance in design. If robots can in fact dynamically reconfigure themselves using the network, they are more tolerant to robot failures. Finally, networked robots have the potential to provide great synergy by bringing together components with complementary benefits and making the whole greater than the sum of the parts.
Bearing in mind the enormous importance of building and use such WRSN systems in the contemporary human society, the necessity of accurate modeling, appropriate experimental testing and verification are unavoidable steps in design and development of such kind complex systems. In that sense, a concept of building one such scalable experimental system is presented in the text to follow. The goal of this paper is to present the concept and main solutions in robot-sensor networking, localization, mapping, navigation, control and communication, and building of robot autonomous operation.
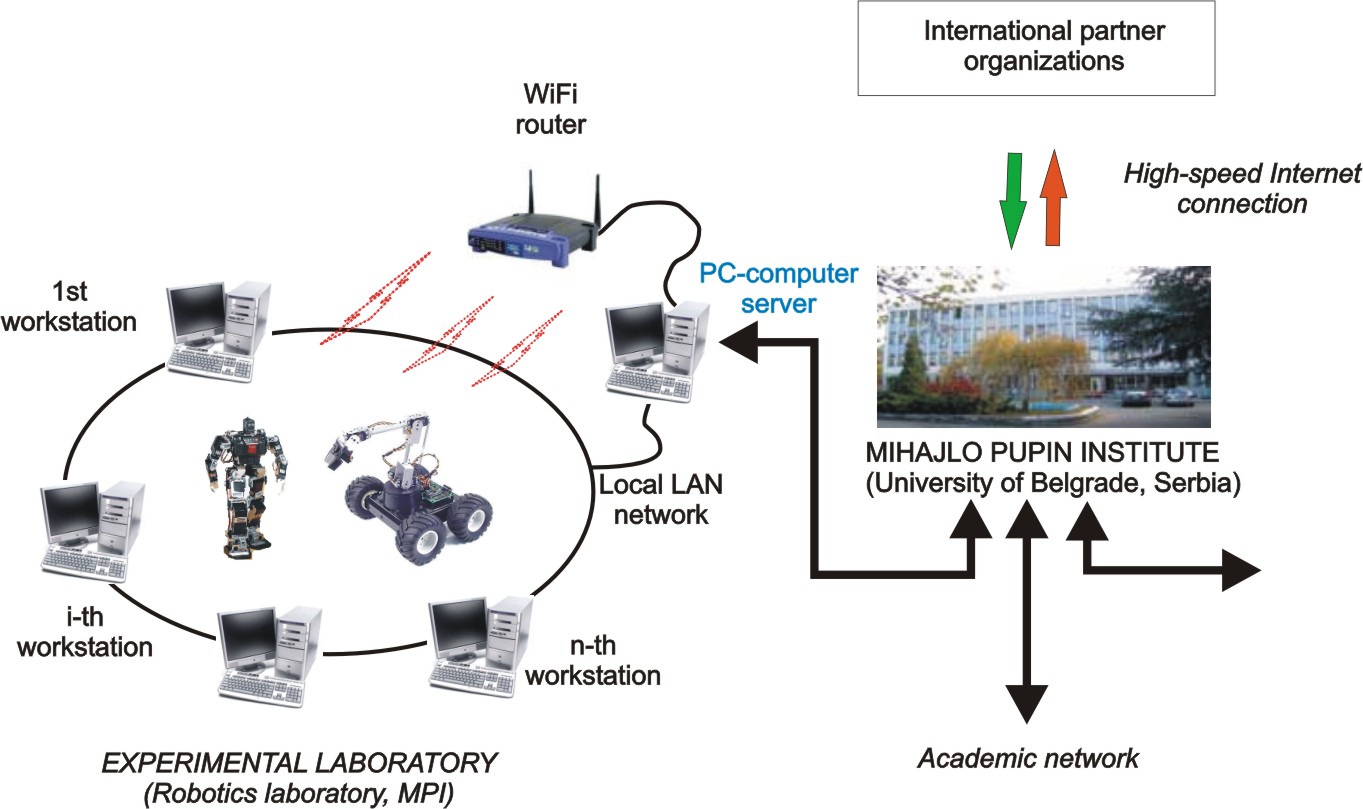
Fig. 2. Principle of remote access to the experimental test-bed system developed in the Robotics laboratory of Mihailo Pupin Institute. User access to the system from the Intranet (academic network at University of Belgrade) as well as via Web-service.
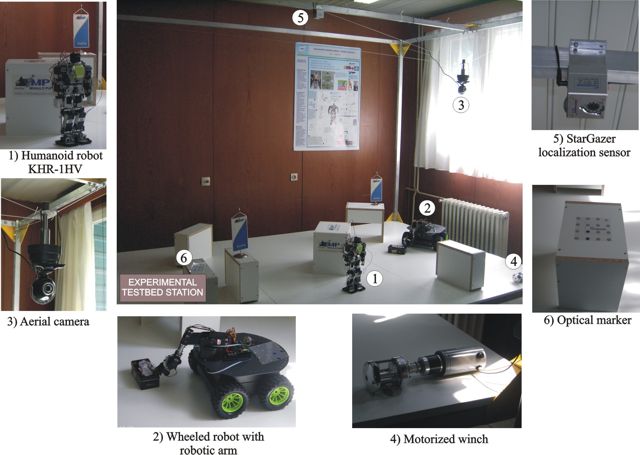
Fig. 3. Experimental testbed station developed in the Robotics laboratory of Mihailo Pupin Institute.

Fig. 4. Testing of multi-agent robotic system