Virtual WRSN
Virtual WRSN (Vitual Wirrelles Robot Sensor Network) is a research software platform for the customized modeling, control and simulation of wireless robot-sensor networks and multi-agent robotic systems. It represents a MATLAB/SIMULINK engineering toolbox designed for simulation of one or more wheeled mobile robots kinematics and dynamics for arbitrary chosen scenario. Virtual WRSN provides a possibility to simulate behavior of mobile robots group (up to eigth robots) in various scenarios and for various control laws (at the servo level as well as cognitive high-level).
Structure of the Virtual WRSN program-suit with the particular software modules available is shown in the picture bellow.
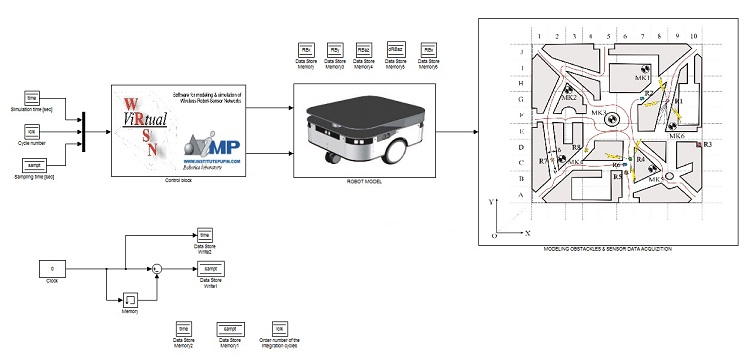
Virtual WRSN software structure
Mobile robot models
Virtual WRSN software has two models of wheeled mobile robots, differentially driven mobile robot and skid-steering mobile robot. Both models takes into account dynamics of robots as well as nonlinear tyre-ground interaction model (Pacejka's Magic formula tyre model). Both dynamic and tyre model parameters can be changed by user by simply editing a data-file.
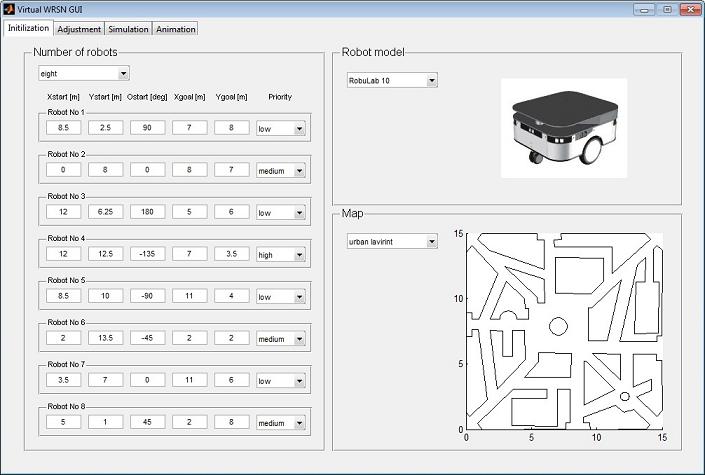
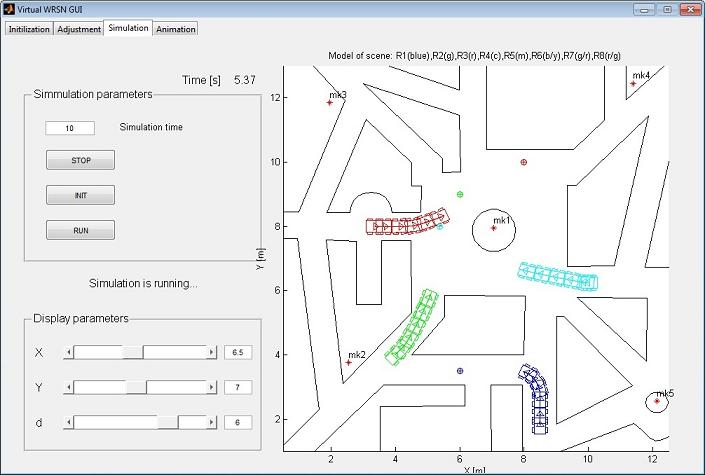
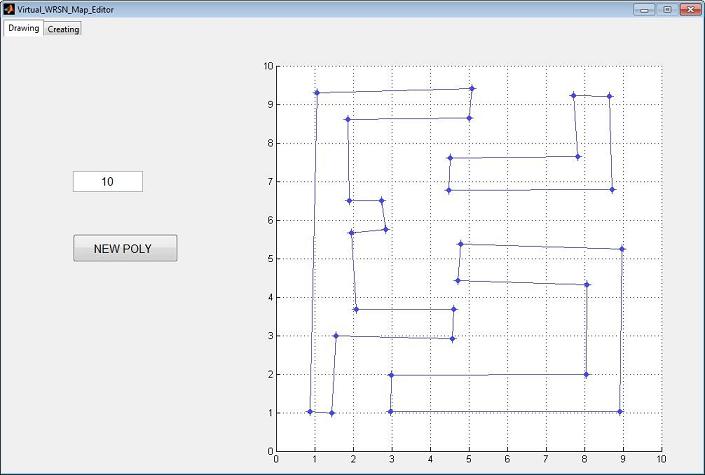
Models of scenario
Custom creates scenario by choosing model and number of robots, model of scene (virtual map), and by assigning robots initial and goal configurations. Software possess aditional program named Map Editor, which purpose is to allow user to define their own virtual environment. User can place obstacles of arbitrary shape on 2D surface, so that robot can move only in free area around static obstacles. When map is defined, software creates its neural network and polygonal conture representation, so Virtual WRSN can simulate behavior of robots acting in created environment.
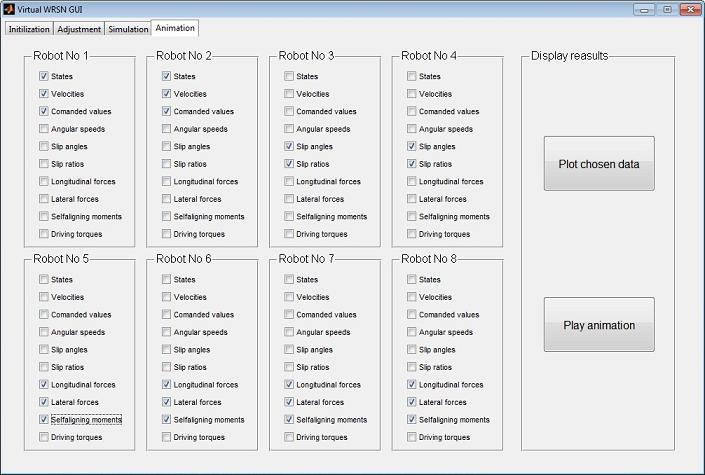
Control algorithms
There are three built-in high level control algorythms for driving robots from start to goal configuration without colliding with obstacles as well as with other mobile robots. Customs can also implement there own control algorythms.
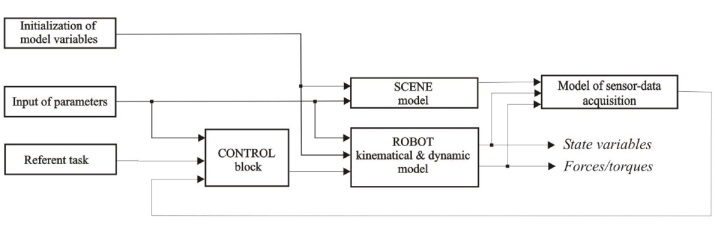
General control architecture sheme
Videos - Simulation Results
Avoiding static obstacles
Colision avoidance
Picture Gallery