
Research Topic: Modelling, Simulation and Control of Quadrotor rotorcraft
The research aim is design and devlopment of control techniques for autonomous take-off, flight and landing of small rotorcraft vehicles (with four, six or eight rotors).
In the last few years researchers has shown great interest in the field of small VTOL (Vertical Take-Off and Landing) aerial vehicles. VTOL platforms have very usefull ability for vertical, stationary and low speed flight. Examples of some VTOL configurations are blimps, helicopters, bird-like prototypes and quadrotors. Each of them has advantages and drawbacks. Maybe the most popular of listed configurations is quadrotor. It has low dimensions, good maneuvearability, simple mechanics and payload capability. He also possess one major drawback, the high energy consumption and for that low endurance. This structure can be attractive in several applications, in particular for surveillance, imaging dangerous environments, outdoor navigation and mapping.

Fig. 1. Quadrotor XAircraft X650
For certain level of autonomy quadrotor must have some sensors that will allow him to be aware of his position in the environment. For the purpose of determinating height from the ground are usualy utilized SOund Navigation And Ranging (SONAR) and an InfraRed (IR) modules. For measuring the robot attitude an Inertial Measurement Unit (IMU) can be adopted. Next the data acquired by sensors have to be processed and handled by control algorythm in the Micro Control Unit (MCU), which provides the signals to the motors. Actually, four motor driver boards are needed to amplify the power delivered to the motors. Their rotation is transmitted to the propellers which move the whole structure (see Fig. 1).
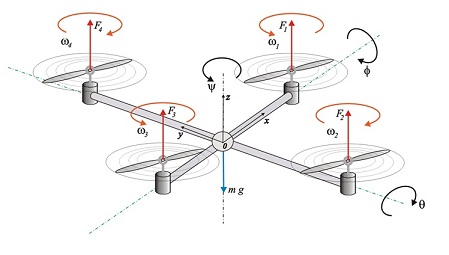
Fig. 2. Model of quadrotor
Quadrotor helicopters are dynamically unstable and, therefore suitable control methods are needed to make them stable. Although an unstable dynamics is not desirable, it is good in the view point of agility. The instability comes from changing of the helicopter parameters and from the disturbances such as a wind gust or air density variation. A quadrotor helicopter is controlled by varying the rotors speed, thereby changing the lift forces.It is an under-actuated dynamic vehicle with four input forces and six outputs coordinates. Basic motions of a quad rotor can be described using model presented in Fig 2.
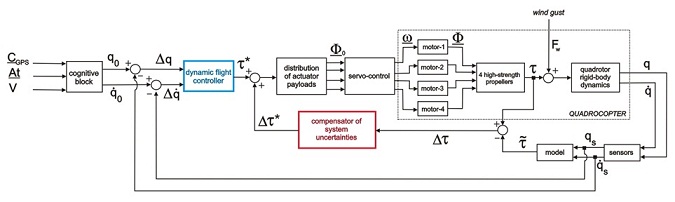
Fig. 3. Detailed control sheme for autonomous quadrotor
Each propeller is connected to the motor through the reduction gears. All the propellers have fixed and parallel axes of rotation. Furthermore, they have fixed-pitch blades and their air flows points downwards (to get an upward lift). These considerations point out that the structure is quite rigid and the only things that can vary are the propeller speeds. Even though, the quadrotor has 6 DOFs, it is equipped just with four propellers, hence it is not possible to reach a desired set-point for all the DOFs, but at maximum four. However, thanks to its structure, it is quite easy to choose the four best controllable variables and to decouple them to make the control task easier. The four quad-rotor targets are thus related to the four basic movements which allow the helicopter to reach a certain height and attitude: throttle, roll, pitch and yaw movements. Fig 3. shows detailed structure of control architecture.

Fig. 4. Example of a rotorcraft trajectory in virtual reality using the Google Earth maps
Trajectory of quadrotor can be introduced by GPS coordinates. Quadrotor is requested to track the imposed trajectory between the particular points with satisfactory precision keeping the desired attitude and height of flight. Quadrotor checks for the current position by use of a GPS sensor and/or electronic compass. Also, the altitude is measured by a barometric sensor. On-board microcontroller calculates the actual position deviation from the imposed trajectory given by successive GPS positions. It localizes itself with respect to the nearest trajectory segment. Using the gyroscope, quadrotor determines desired azimuth of flight and keeps the desired direction of flight. Height of flight is also controlled to enable performance of the imposed mission (task).