
Research Topic: Building of Intelligent Collaborative Behavior with Multi-Agent Robotic Systems Based on Biological Principles
The research objective is to provide an open, versatile platform for the broad introduction of robotic multi-agent cooperative teams into the human everyday life, building systems capable to perform different delicate, tiresome and time-consuming tasks autonomously or in cooperation with human partners. The groundbreaking innovations are:
- Investigations towards a theory of collaboration resulting in building of artificial collaborative/collective behavior attributes of heterogeneous multi-robot teams based on natural bio-principles and advanced methodologies from artificial intelligence and cognitive science.
- A versatile technology platform in response to the different application scenarios concerning use of intelligent multi-agent robot teams.
- A safe and robust cooperative technology based on perception, cognition and advanced behavior of multi-agent robotic (high-tech) systems that sets the scene for using the platform in different indoor applications.
- The experimental test-bed scenario, as a specific scaleable, dynamic shopping-mall (store) scenario model, with multi-agent robotic systems employed as a cooperative team performing delivery/transportation, surveillance/monitoring, cleaning and other characteristic tasks, autonomously or in cooperation with humans.
Robot-agents will learn cooperation through simulation and experimentation and through interaction with humans. In that sense, different concepts of behavior-based control (centralized or decentralized) will be developed, tested and evaluated in real situations to fit well the operative strategy within a chosen store-application. The results of the R/D will lead to an affordable platform that is targeted to the market, open to the whole class of applications that require a safe and reliable robot cooperation during complex dynamic tasks.
The need to assist (substitute) humans working on delicate, tiresome and monotonous tasks, or working with potentially health-damaging toxic materials, requires intelligent, high performance robots with the ability to cooperate, advanced communication and sophisticated perception and cognitive capabilities. In particular, heterogeneous robotic multi-agent systems (teams) are expected to be involved in every-day life within the public domain, in applications as diverse as: rescue missions, security, nursing, flexible production processes, market, entertainment, delivery, as well as specialized crews at the space orbital stations or bio-chemical laboratories at remote locations, etc. All of these demanding applications mean that the research community should consider robotic systems in a quite different way, in the sense of their integration and networking to bring them together into multi-agent collaborative groups/teams capable of performing a variety of complex tasks as required.
Intelligent robotic collaborative multi-agent systems represent multi-purpose artificial systems with advanced perceptive, cognitive and cooperative capabilities, operating together with the aim of achieving a common goal. The structure and complexity of such systems can vary significantly depending on the specific application and scenario requirements. The general concept of one heterogeneous, multi-agent collaborative system presented in a symbolic form is shown in Fig. 1. The core of such multi-agent system is collaborative behavior, as presented in Fig. 2. Collaborative behavior characteristics are influenced by the individual and collective behavior attributes (IBA and CBA) of group members, as well as by an environment (EN) and corresponding scenario model (SM). With biological systems, collaborative behavior is a part of instinct, but it can also be acquired through sophisticated perception and learning (e.g. with infants), as well as through exchanging experiences with others (e.g. parents, colleagues, team partners, etc.) as it is presented in Fig. 3. The same principles will be utilized in these researches for building artificial collaborative behavior attributes with a heterogeneous robotic multi-agent system.
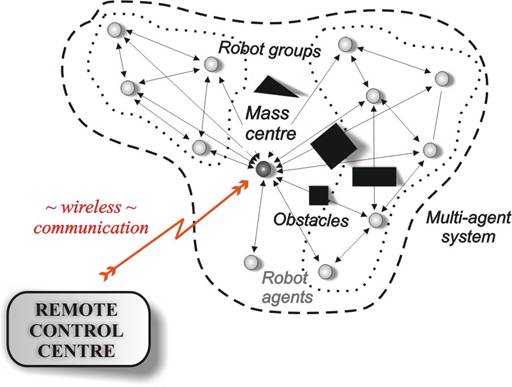
Fig. 1. General concept of a multi-agent robotic system.
Intelligent robotic cooperative multi-agent system represents a typical dynamic distributed system (Fig. 1). It consists of individual robot-agents and/or groups of agents that are networked, capable of acquiring and processing information from their surroundings, communicating between themselves, and sharing information/experrience within the team. Robot agents, as individuals, possess advanced perceptive, communicative and cognitive characteristics. One such system can be organized on two different principles: centralized and decentralized. The centralized structure (model) operates with a hierarchical principle based on system subordination (a master-slave relationship). One such structure possesses a mass center (Fig. 1) for the entire system. The mass center is an individual agent with advanced technological performance, capable of coordinating and commanding the team. The main benefit of such an organizational structure, which has many potential advanced applications, is the possibility of web-oriented remote control (Fig. 1) and supervision of the overall cooperative system. The decentralized model brings to the system more autonomy and flexibility, through the possibility of negotiation, and consensus decision-making and task-performing. Both models support the fundamental attributes of collaborative (collective) behavior. Centralized and decentralized models are considered in order to investigate the best operative solution.
The core of any multi - agent system (as it is depicted in a symbolic form in Fig. 2) is to enable inter - team cohesion and inter-agent cooperations and building of collaborative behavior. Collaborative behavior is based predominantly on the existence of collective behavior attributes (CBA), but also on individual behavior attributes (IBA).
Individual attributes give the system a desired intelligence necessary to plan and perform the imposed tasks, while the collective attributes provide the system with a “collective mind” enabling it to acquire the necessary skill and experience to cooperate with other individuals in the team (network) performing tasks that are not possible to be executed by agents individually. Different environments, as well as specific scenario models, influence the behavior of multi-agent system considered expressing different characteristics of collaborative behavior depending on environment-specific conditions or scenario-specific situations. Artificial collaborative behavior of heterogeneous multi-agent robotic systems can be built through advanced sensing, sophisticated perception and learning. By being able to communicate, robot-agents collect and share information obtained from their perceptive systems, as well as knowledge obtained through learning of cooperative activities. This information collected through experimentation represent an experience, stored in corresponding databases within the system. This experience/knowledge of the overall system is utilized when a similar situation appears in parallel with perception and on-line learning. Through experience, a multi-agent system solves collaborative tasks much easier and faster than at the beginning, when system has no “history” in its library (database). Bearing in mind previous considerations, individual behavior attributes (IBA), collective behavior attributes (CBA), scenario model (SM), and environment (EN) constitute a core i.e. framework of the collaborative behavior CB (see Fig. 2).
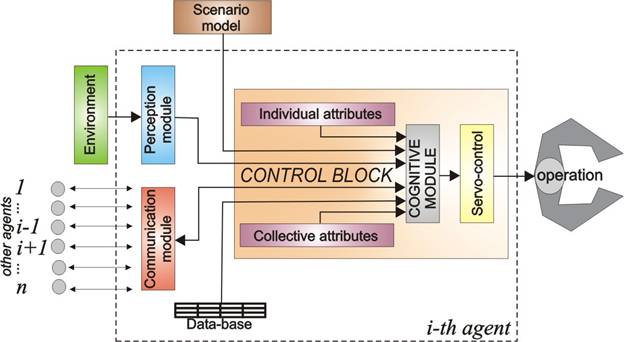
Fig. 2. High-level system description – functional relationship among the robot-agents.
The above hypothesis on building intelligent collaborative behavior has a proof in commonly known examples. Competent individuals (for example in sport) often do not imply a good collective/team. In practice well-trained teams of moderately skilled individuals attain better results than non-trained groups of extraordinary individuals. Concerning scenario models, the same group of individuals behaves differently in a rescue mission, for example, compared to goods delivery in a shopping-mall scenario. A dynamic environment also represents an important factor in determining the collective behavior of any multi-agent system. Depending on environment conditions, one behaves differently in similar situations. For example, a group of individuals behaves differently as customers in a mega-store than in a fashion-store, bookshop or shoe-shop. Behavior in different life situations and conditions is the subject of permanent, on-line perception, learning and experience that people acquire or get from other people (e.g. children from parents).
Building of an artificial CB (including IBA, CBA, SM and EN) is based on a consistent theory on collaborative behavior. One such theory will be materialized in advanced intelligent robotic multi-agent collaborative behavior and experimentally validated in a shopping-mall (mega-store) virtual reality scenario.
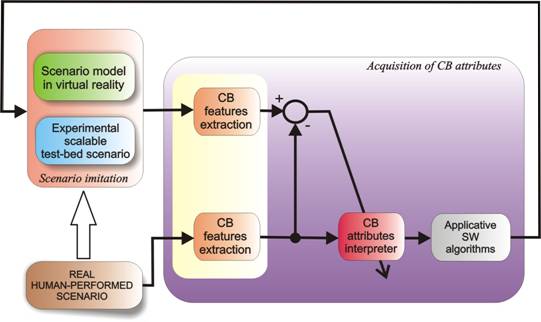
Fig. 3. Sketch of the scheme for acquisition of collective behavior attributes (CBAs).
For the purpose of experimental verification of the research results obtained, several heterogeneous mobile robot-agents are networked into the unified multi-agent system presented in Fig. 4. Here, different robots, as well as human agents, will appear in the scene. One minimal setup of five robot agents for example will assume:
- two robot-delivery agents (for transportation of articles),
- two info-bots (robot-surveillance and information-sharing agents), and
- one cleaning-robot agent (for interior hygiene maintenance) with an aspirator for dust removal for example.
Several human agents will be involved in the scenario:
- two human-contributor agents (to manipulate the articles in the store and to perform other manual activities in the scene),
- several human-customer agents, who appear in the scene looking for articles at the store desks/racks, getting on-line information from info-bots, and getting support from robot-agents in article carrying.
The layout of a macro test-scenario (robotized department store) to be experimentally tested in virtual reality is shown in Fig. 4. Humans and robots perform different tasks, and consequently the clear distribution of tasks per agents exists. In the scope of the macro-scenario presented in Fig. 4, several, specific micro-scenarios will be considered, too. These micro-scenarios will be performed to validate the quality and efficiency of the particular collaborative behavior attributes to be developed in the project. The micro-scenarios (MS) are marked in Fig. 4, too.
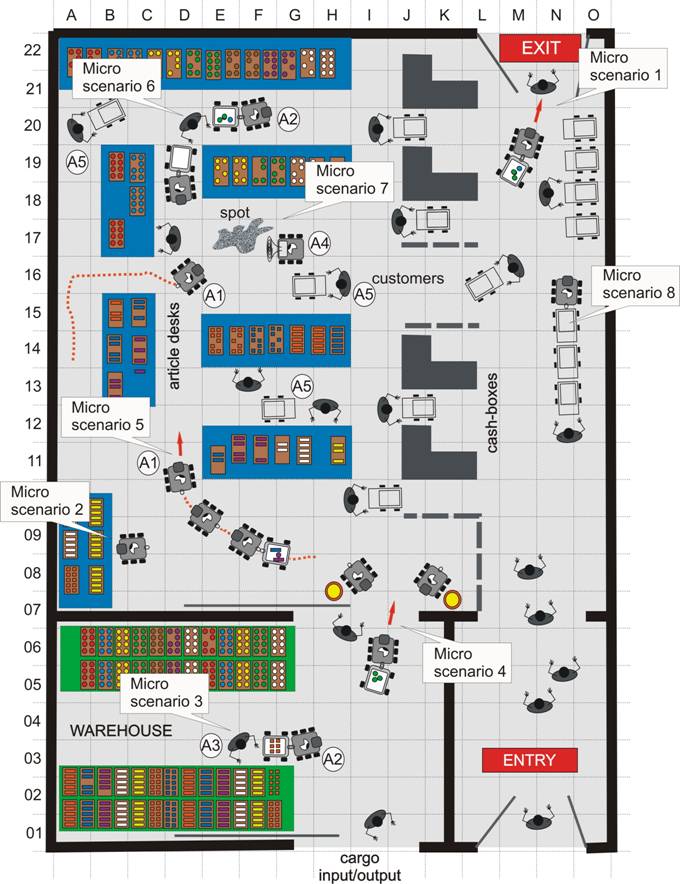
Fig. 4. Layout of the store-scenario – an experimental demo-scenario with heterogeneous agents to be utilized for demonstration of the collaborative multi-agent behavior.