
Research Topic: Driver Model-Based Safety/Alert Control/Supervisory Systems and System for Quantification of Human Operator Driving Effort
R/D activities in this project concerns with building of advanced high-tech safety-alert systems to be designed (prototyped) for new generation of automotive systems, based on the bio-inspired, cognitive-motor model of human psycho-physiological behavior as road vehicle operator. The functional core of all high-tech products to be described in this report represents the DVL-driver software module. Having in mind the characteristic of the DVL-driver module, different products can be derived depending on desired function imposed as well as depending on available sensory-motor technology available at the automotive system. Three diffrent ICT products will be reported here: (i) Driver-assisted alert system for improvement of driving skill (on-board electronic driver instructor), (ii) User-oriented electronic system for quantification of driver skill (cognitive-motor efforts), and (iii) automatic driver, specialized automatic control system to be designed for automatic (driverless) vehicle operation.
Remark: Need partners from industry interested in further development of the research variant of considered software applicative modules (prototype of a human cognitive-motor model) that would enable building some of the proposed industrial products and provide to the open market!
Conventional vehicles are managed by human-operator. The skill of driving strongly depends on driver’s experience as well as his/her psycho-physiological, motor and perceptive capabilities. Driver uses perception as well as proprioceptive feedbacks from the manual commands (steering wheel, acceleration/braking pedal) to guide vehicle on the road. A conventional driver-vehicle system is presented in Fig. 1.
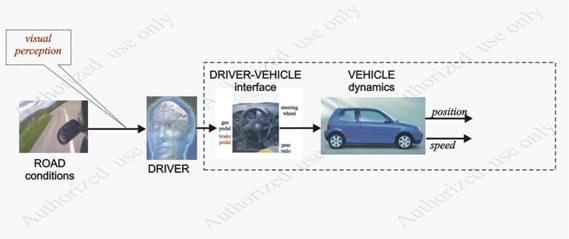
Fig. 1. Conventional man-machine (human-driver) system.
With advances of ICT, GPS (GIS) technologies GPS navigation systems become commercially available to the public customer. Using GPS navigation system, driver is able to optimize driving trajectory, moves in unknown areas as well as to escape traffic jam and some dangerous street section for example. GPS system requires his/her attention in short intervals and need driver to concentrate him-/herself to the GPS display in particular time-instants. Generally spoken, GPS navigator is rather useful electronic device and it assists people to mange their best trips.
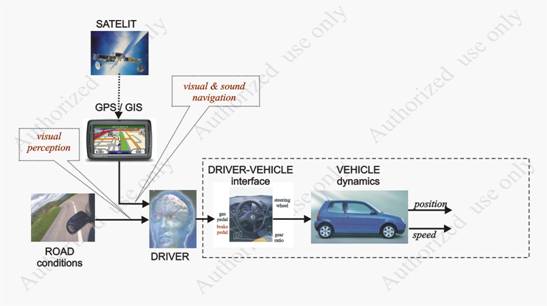
Fig. 2. Conventional driver-vehicle system with additional GPS navigator enabling better managing of trip routes.
Some types of prestige cars possess additional sensing system such as a telematics and/or infra-red night-vision. These useful sensory systems enable early detection of mobile and immobile obstacles appearing on the road and warn driver to adapt the speed or change the course of motion to escape collision. Both sensor systems need some additional attention of the driver to check the information on the display.
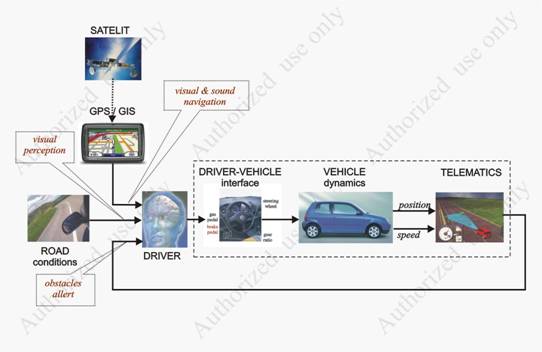
Fig. 3. Block-scheme of a contemporary automotive system equipped with telematic system and infra-red night-vision.
Active safety of road vehicle can be significantly improved and advanced by introduction an on-board safety-alert electronic system that are based on the driver cognitive-motor model, GPS/GIS system as well as some additional sensing system detecting actual lateral and longitudinal relative position on the road. With advancements in ICT and sensory technology there are different types of sensors that can be available for this purpose such as: distance range-finders, short-wave radars, magnetic sensors, infra-red proximity sensors etc. The main idea of newly proposed safety-alert system is to warm human-driver during a trip about inadequate commands and possible hazard situations depending on acquired information from the available sensory system as well as by comparison of the actual driver’s commands with the commands generated by experienced driver emulated by a driver-model (DVL-driver). Parameters of the DVL-driver model are tuned off-line in such a way to correspond to the well experienced driver-instructor. In such a way proposed system operates as electronic instructor giving timely the sound warnings to the human –driver (e.g. to adapt the speed to the forthcoming road geometry or obstacle appearance, to change the course of motion or just to stop the car). GPS system provides in real-time with necessary information about road geometry (geometry prediction).
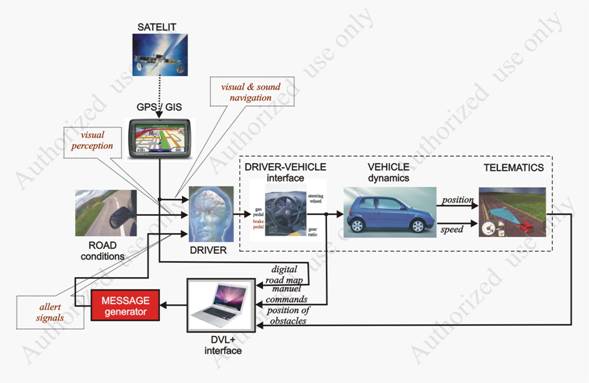
Fig. 4. On-board intelligent safety-alert system to be designed to improve
driver’s attention and skill of operation.
The highest level of vehicle automation represents building of automatic driver (virtual driver). That concerns with driverless operation of automotive system. In bad weather conditions, for aged and disabled people, people under influence of drugs and alcohol, long-line trips, an automatic mode of operation is very promising solution. Of course it is very complex and delicate task to build one such responsible control system. Be aware of the complexity of one such development in every-day life, out intense is to make a prototype of one such system that would be able to operate in simulation conditions (virtual reality). We are of opinion that crucial point is to proof that the accurate model of human driver behavior as vehicle operator is able to handle the system in satisfactory way. The rest are tasks of the technology and industry how to equip one such system to be reliable and safe. The conceptual block-scheme of one such system is presented in Fig. 5. The central point represents DVL-driver cognitive-motor model developed for analysis of human driver effort and control purposes. Parameters of the virtual driver can be tuned experimentally in real driving conditions as well as with well experienced driver. For our purpose we have optimized parameters in simulation conditions with CAD models of real existing digital road-maps. Automatic driver has expressed satisfactory accuracy of longitudinal and lateral position on the road (deviation less than 0.5 [m]) and fine yaw dynamics.
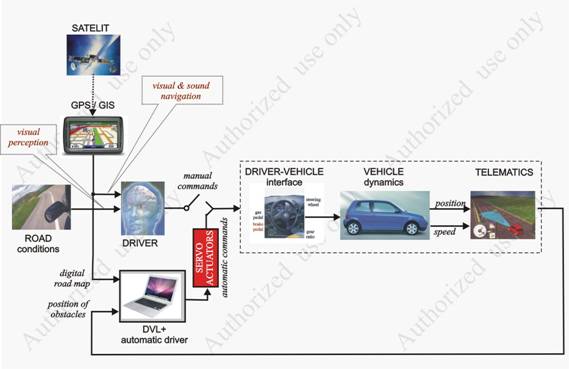
Fig. 5. Advanced road vehicle controller – automatic driver in the loop.
Especially interesting and commercially attractive embedded electronic system (e.g. integrated with GPS device or independent) as a potential high-tech product dedicated to the automotive market, concerns with methodology of precise quantification of driving, cognitive-motor effort/skill of human operator. One such system can be installed on-board in the car cockpit or within the car-simulator to measure driving skill of the candidate. System can be used in driving schools assisting candidates to test their operation skill during training. In the cockpit, such measuring system enables precise quantification of driving effort of a young, for example non-experienced car-driver. The principle is rather simple. Commands variables (signals from corresponding sensors attached to the steering, traction, braking and gear-box system) from the driver-vehicle interface are acquired and sent to the DVL+ interface (it represents driver model) as presented in Fig. 6. Driver commands as well as the virtual commands, generated at the output of the DVL+ interface, are compared and forwarded to the driver’s skill analyzer (see Fig. 6). Analyzer quantifies the driving skill through comparison of the real driver parameters with the corresponding ones assumed to characterize the well experienced driver (virtual instructor). In such a way, quantified skill is normalized to the value of the skill driver. In that sense, a skill driver has pondered with 1.00 while the non-experienced ones can be pondered in the interval [0,1]. As the driver is better the value grows up to the 1.00 and vice-versa.
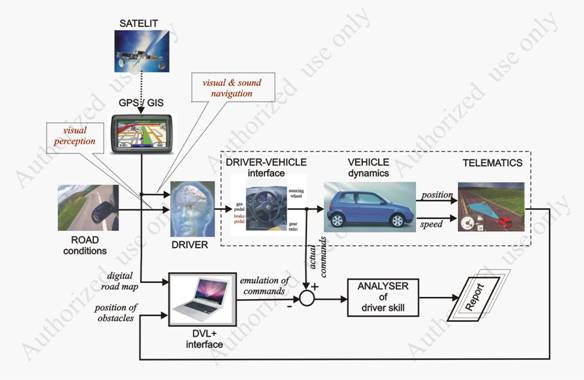
Fig. 6. Electronic system for precise quantification (measurement) of the human-driver cognitive-motor effort, i.e. driving skill.
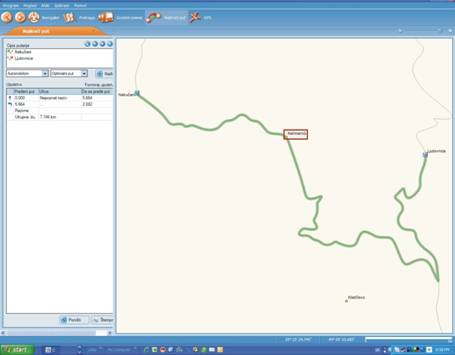
Fig. 7. An example of the vector format of a desired path generated by automatic router (Plan +, commercially available GIS system).
Relevant reference list
- [1] A. Rodic, M. Vukobratovic, "Contribution to the Integrated Control Synthesis of Road Vehicles", IEEE Transaction on Control Systems Technology, Vol. 7, No. 1, pp. 64-78, January 1999.
- [2] A. Rodic, M. Vukobratovic, “Design of an Integrated Active Control System of Road Vehicles”, Journal of Computer Application in Technology, special issue on Active Structures, Vol. 13, Nos. ½, pp. 78-92, January 2000.
- [3] A. Rodic, D. Katic, M. Vukobratovic, “The Connectionist Compensator for Advanced Integrated Road Vehicle Controller”, Engineering & Automation Problems, International journal, Vol. 2, No. 1, pp. 27-39, Moscow, Russia, 2001
- [4] A. Rodic, M. Vukobratovic "Advanced Control and Stability of Autonomous Road Vehicles, PART I Synthesis of a hybrid neuro-dynamic controller", International Journal of Computer Application in Technology, Vol. 15, No. 6, pp. 233-247, 2002
- [5] M. Vukobratovic, A. Rodic, "Advanced Control and Stability of Autonomous Road Vehicles, PART II Practical stability of road vehicles", International Journal of Computer Application in Technology, Vol. 15, No. 6, pp. 248-263, 2002.
- [6] A. Rodic, M. Vukobratovic, Dynamics, Integrated Control and Stability of Automated Road Vehicles, Research monograph, ibidem-Verlag, Stuttgart, Germany, ISB N 3-89821-203-3, 214 pages, 2002
- [7] K. Addi, D. Goeleven, A. Rodic, “Nonsmooth Mathematical Modelling and Numerical Simulation of a Spatial Vehicle Dynamics”, Zeitschrift für Angewandte Mathematik und Mechanik (ZAMM), Wiley-VCH Verlag GmbH & Co. KGaA - Weinheim, DOI 10.1002/zamm.200410235, pp. 1-25 (2005)
- [8] A. Rodic, M. Vukobratović, “Intelligent Integrated Control of Vehicle Stability Characteristics”, in Proceedings of EAEC2005 European Automotive Congress, Serbia & Montenegro, Belgrade, June, 2005
- [9] A. Rodic, E. Schnieder, “Hybrid Model-Based – Knowledge-Based Control of Driver-Vehicle System Performances”, in Proceedings of EAEC2005 European Automotive Congress, Serbia & Montenegro, Belgrade, June, 2005
- [10] A. Rodic, “User Oriented Software Toolbox for Advance Modeling, Control Synthesis and Simulation of Automotive Systems”, in Proceedings of EAEC2005 European Automotive Congress, Serbia & Montenegro, Belgrade, June, 2005
- [11] A. Rodic, DVL+ Advanced Automotive Engineering Software Toolbox for Matlab/Simulink - Modeling, Simulation and Control of Automotive Systems