
Research Topic: Hazard Prevention Control System – Intelligent Driver-Assisted Control of Automotive System for Improvement of Active Driving Safety
The objectives of the project concern with building of an intelligent control system, based on advanced modelling of driver cognitive behaviour, that is capable to improve in an active way the active driving safety. The control system is verified in simulation experiments in different driving situations and conditions.
The main role of the Hazard Prevention System (HPC) designed with automotive systems is to predict and to actively control a hazard motion of road vehicles: e.g. to decrease vehicle speed, to stop the car, to improve the steering wheel angle, etc. This is a delicate control task that requires knowledge of vehicle dynamics as well as satisfactory accurate cognitive driver-model. The HPC system consists of two functional modules: (i) a path observer and, (ii) a knowledge-based controller. Together, they make a smart control structure, i.e. an active safety control system based on fuzzy and knowledge-based reasoning algorithms of modelling human driver behaviour.
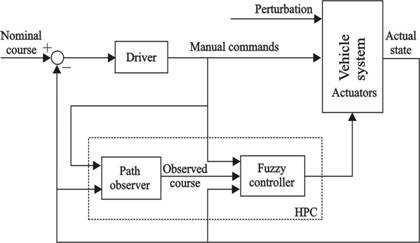
Fig. 1. Hazard prevention system within a closed-loop control structure.
Path observer identifies forthcoming road geometry in direction of vehicle movements. Knowledge-based controller represents a cognitive model of an experienced vehicle operator - driver. Parameters of the controller are tuned experimentally off-line on the basis of measured or simulation data. The best fit of the model parameters are obtained using experimental/simulation results of different running tests. Main task of the knowledge-based controller designed is as well as the role of the experienced driver-instructor assisting to an inexperienced vehicle operator. The control signals from the controller are led to the vehicle actuators. They serve to change the driver manual commands using corresponding servo-actuators of steering, traction or braking system. Beside acquisition of the desired road geometry and providing control commands of path tracking, the proposed HPC system was designed to possess certain additional functions in hazard prevention, cruising control, platooning, automatic parking, etc. With a radar system installed in the car, the HPC is able to control vehicle motion in the presence of obstacles on the road.