
Research Topic: Intelligent Control of Vehicle Lateral and Yaw Dynamics – Driver-assisted Control System for Improved Vehicle Stability
Advanced hybrid, knowledge-based – model-based control system of road vehicle interactive dynamics was designed in the project. The proposed driver-assisted control system was designed to improve vehicle stability, active safety and handling performances using four wheel steering, active driving/braking and active suspension system. The control scheme was designed based on a centralized, dynamic control approach with a supplementary knowledge-based compensator (connectionist structure) in the feedback loop. The distributed hierarchy control strategy, with two control levels - tactical and operative (servo), was implemented.
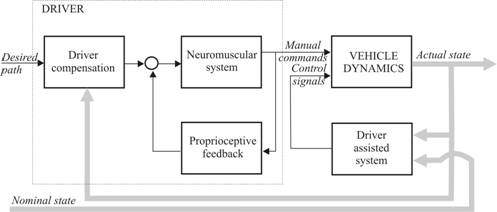
Fig. 1. Block-scheme of a driver-vehicle system with the active stability, driver-assisted control system in the feedback loop.
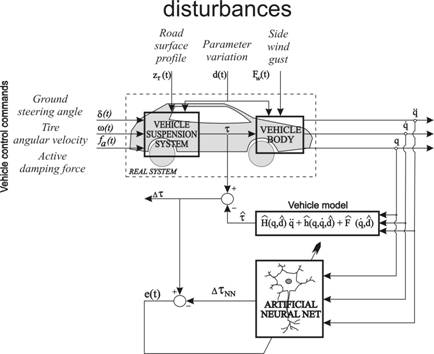
Fig. 2. Structure of the training process during system identification.