
Research Topic: Control of Biped Robot Dynamics Maintenance of Dynamic Balance and Stable Gait
The research concern with building of different algorithms for control biped robot dynamics designed to enable stable walk, maintenance of dynamic balance, desired leg impedance and accuracy of feet positioning during obstacle escaping.
Control of humanoid robots has to satisfy the following requirements: (i) accuracy of tracking the desired trajectories of the mechanism joints and feet relative positions and velocities, (ii) maintenance of dynamic balance of the mechanism during the motion, (iii) minimization of feet impacts arising at the moment of contact of the free foot and the ground during the gait, (iv) minimization of dynamic loads at the robot joints, and (v) realization of anthropomorphic characteristics of the gait. Fulfillment of requirement (i) enables the realization of a desired mode of motion, walk repeatability and avoidance of potential obstacles. To satisfy requirement (ii) it means to maintain balance of the dynamic reactions acting upon the robotic system during the motion. Fulfillment of requirement (iii) decreases the impact effects on the overall system at the moment when the unconstrained leg foot strikes the ground. Fulfillment of requirement (iv) is needed for the purpose of minimizing dynamic loads at the robotic joints, which is especially important for the joints bearing the highest load during the walk, e.g. the hip. Requirement (v) is related to the quality of artificial (human-like) gait. Walk of a physically healthy human represents a balanced and harmonious sequence of movements, with minimal displacements of the position of the mass center about an imaginary central position corresponding to the human’s posture at rest. Bearing in mind the control requirements, it is necessary to control the following quantitites: positions and velocities of the robot joints, ZMP position, contact force at the instant of foot striking the ground, and dynamic load forces at particular mechanism joints. Control system designed in this project involves four feedback loops: (i) position-velocity feedback, (ii) dynamic reaction feedback at the ZMP, (iii) impact-force feedback at the foot of the free (unconstrained) leg, and (iv) load feedback at the mechanism joints. The dynamic controller was realized at two control levels: tactical and executive.
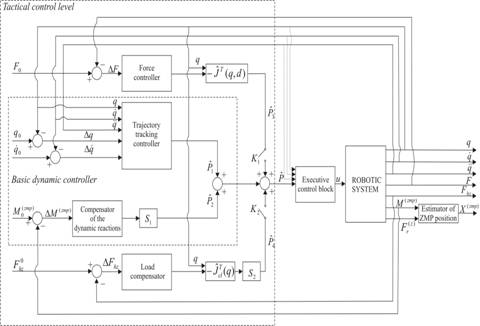
Fig. 1. Block-diagram of the integrated dynamic control of a biped locomotion mechanism with four feedback loops and with executive control block at the lower level.
Research Topic: Adaptive Leg Impedance Modulation with Humanoid Robots
The research concern with development of algorithm for adaptive leg impedance modulation with biped locomotion robots (humanoids) taking into account the biological principles of leg impedance variation with human beings. The way of leg impedance modulation with biological systems is identified by use of capture motion experiments with human walk in the laboratory conditions.
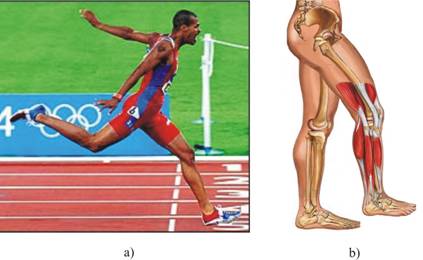
Fig. 1. Natural impedance of human legs: a) leg muscles enable running by changing their strength characteristics, b) leg muscles and ligaments as natural body “actuators” and natural “shock-absorbers”.
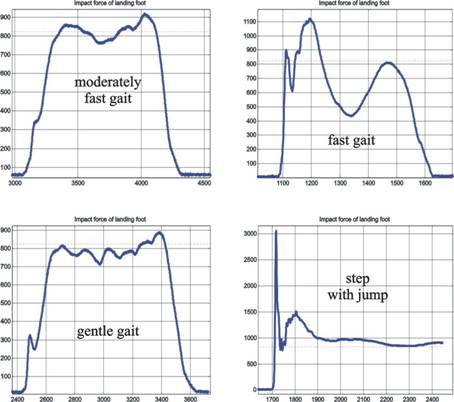
Fig. 2. Experimentaly measured ground reaction forces at human footsole in the stance phase of the gait – different peaks of amplitudes depending on gait characteristics.
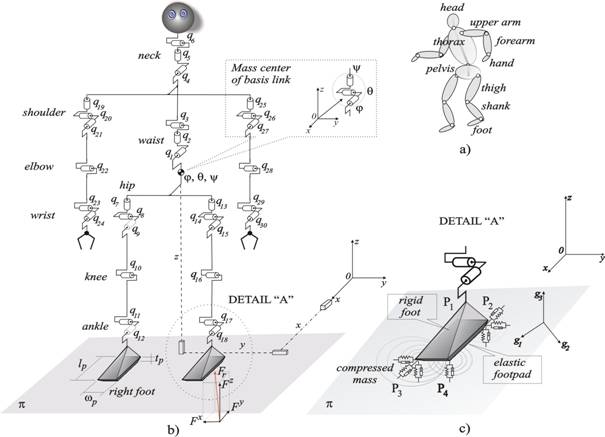
Fig. 3. a) Spinal robot model with two-segments trunk considered in the project, b) Spatial model of a biped robot mechanism interacting with dynamic environement used for verification of the adaptive leg imepdance modulation algorithms, c) compliance model of the ground support used in simulation.