DVL+
From the point of view of mechanics, a vehicle represents a complex, distinctly nonlinear, dynamic system with a relatively large number of degrees of freedom (DOFs), belonging to the class of large-scale dynamic systems. These DOFs (independent motion directions), especially those that essentially influence the system's stability and quality of its dynamic behavior, have to be controlled. The vehicle stability, quality of its dynamic behavior and maneuvering capabilities depend to a great extent on the structure of the system and performances of its power-actuating subsystems. Selection of a best control strategy and its realization, within the limits of technical capacities of the system, represents a delicate problem whose solving requires knowledge of dynamic behavior of the vehicle under different conditions of motion. To that end, mathematical model of the driver-vehicle system in the interaction with a dynamic environment represents a starting point in the stage of system design and its automatic control. That was the strong motivation for developing of the DVL+ automotive engineering toolbox. Its realization in the MathWorks’ Matlab/Simulink background gives it necessary simplicity for implementation in the design process, system analysis as well as in education.
The DVL+ represents user-oriented, Driver-Vehicle in the Loop modelling software operating in the MathWorks MATLAB/SIMULINK programming background. Algorithmic fundament of this software package is extended in particular by implementation (plus ‘+’) of the complementary knowledge based identification structures.
DVL+ automotive engineering toolbox has several functional software modules:
- DVL – tyres - the software module that provides a non-linear, empirical model of tyre pneumatics based on Sakai or Pacejka commonly used tyre models. Complementary software for tyre parameters estimation based on the experimental characteristics is available, too.
- DVL – suspensions - the software module that provides a linear/non-linear model of vehicle tyre suspension system. It includes tyre suspensions as well as a 4-wheel suspension system.
-
DVL – power drivetrain -
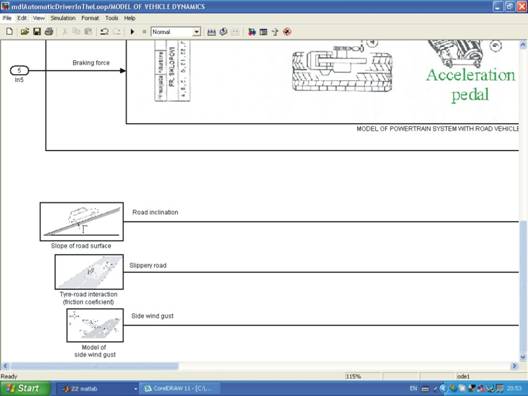
the software module that provides a non-linear model of the power drivetrain (traction) system of road vehicle including the particular models of:
- IC engine (gasoline motor),
- automatic transmission system,
- vehicle drivetrain,
- braking system as well as
- planar vehicle dynamics.
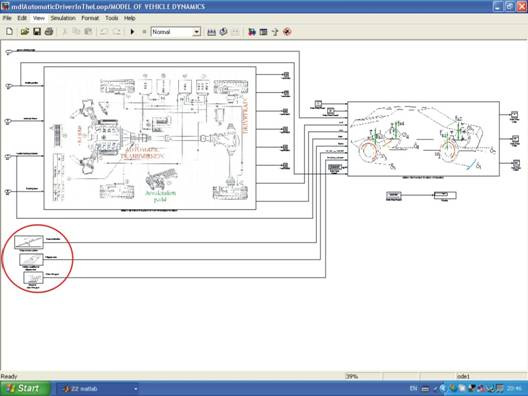
- DVL – vehicle dynamics - a software module that represents non-linear model of the entire road vehicle dynamics including vehicle body 3D- or 2D- dynamics, suspension dynamics, simplified traction and braking system as well as tyre dynamics. This software module represents an open-loop, general software simulator of an automotive system.
-
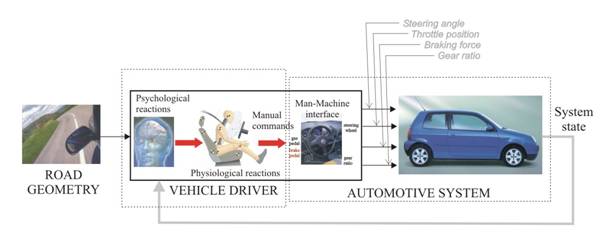
DVL – driver -
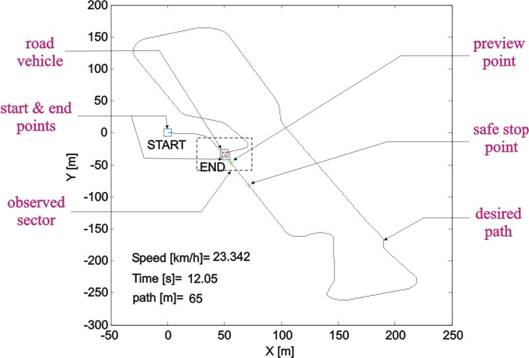
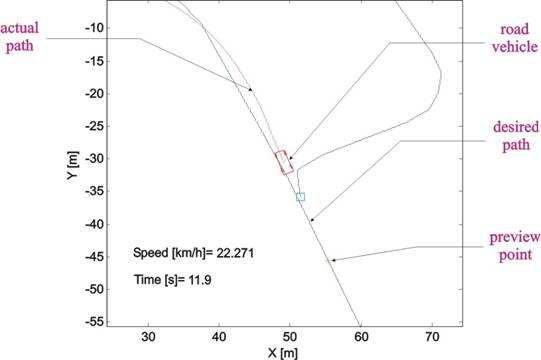
a software module that provides an empirical, knowledge-based model of a psychological as well as physiological behaviour of a vehicle human operator (driver). This module also includes:
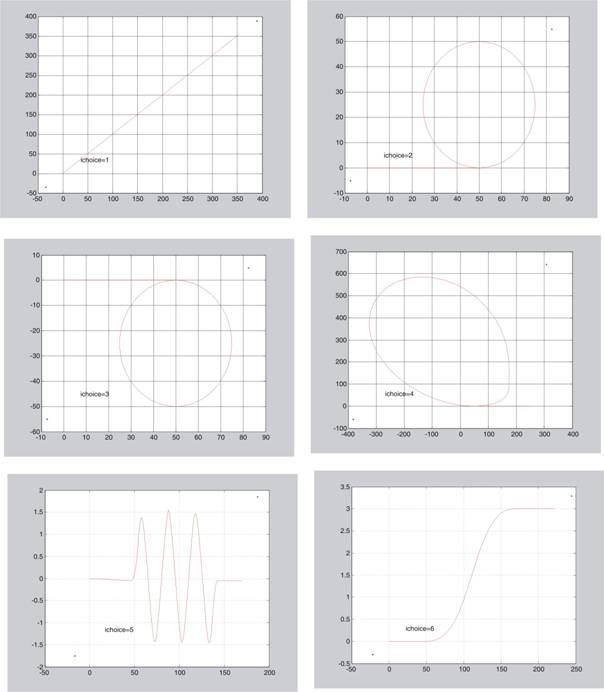
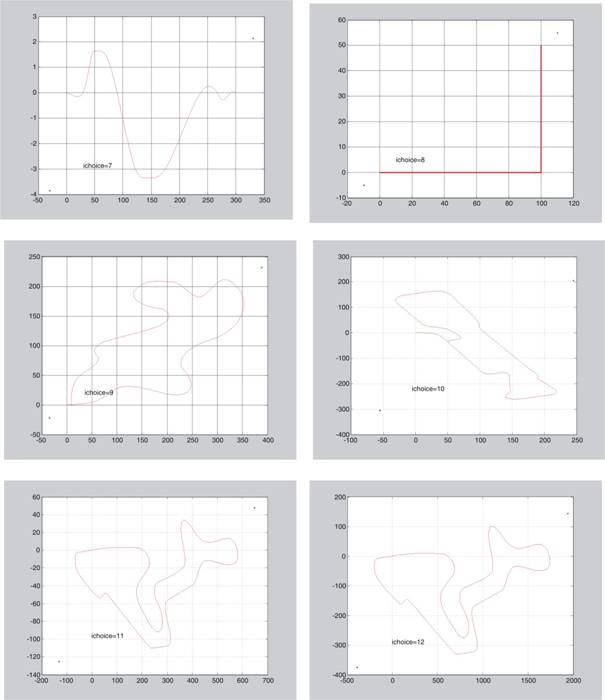
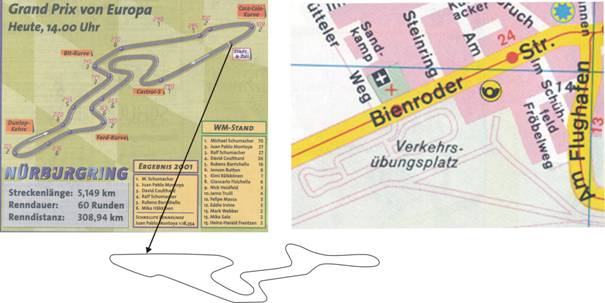
- CAD-model of a path geometry,
- model of a driver-vehicle (man-machine) interface,
- model of a power drivetrain system of road vehicle, as well as
- model of a planar (longitudinal, lateral, yaw dynamics) vehicle dynamics.
- DVL – suit - a software module that provides integrated model of the entire closed-loop hybrid driver-vehicle system including all particular, previously mentioned software modules without simplifications. In that sense, this module represents a multi-variable closed-loop software simulator of the entire (driver-vehicle in the loop) automotive system.
All parameters of the system (design parameters, tyres, engine, brake, steering, transmission, driver, etc.) can be changed due to the characteristics of the system considered.
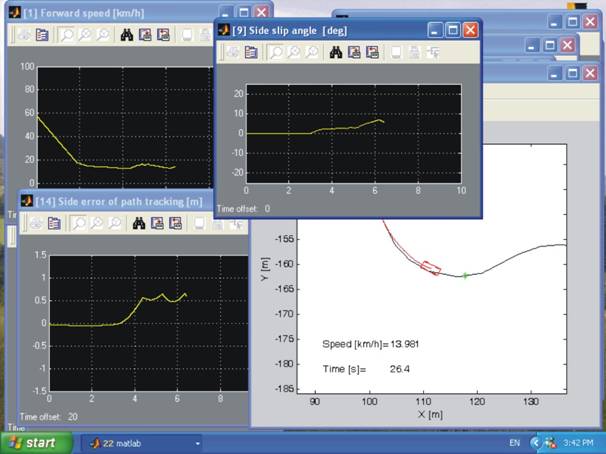
DVL+ User GuideVideos - Simulation Results
DVL+ simulation
Picture Gallery